仿真科普 | 低空經濟的“數字風盾”:CFD+數字孿生構建智慧風場仿真體系

![[媒介版頭2026].gif](https://bexp.135editor.com/files/users/1466/14660444/202605/7MXqbENR_zRpX.gif?auth_key=1780243199-0-0-bd437c9c8be9d0610d708cf765a0517a)
隨著低空經濟被納入國家戰略性新興產業,城市低空空域的商業化運營正在從構想走向現實。然而,一個被長期低估卻至關重要的技術瓶頸逐漸浮出水面——城市低空風場的復雜性與不確定性,已成為制約飛行器安全、能耗與運營效率的核心因素。
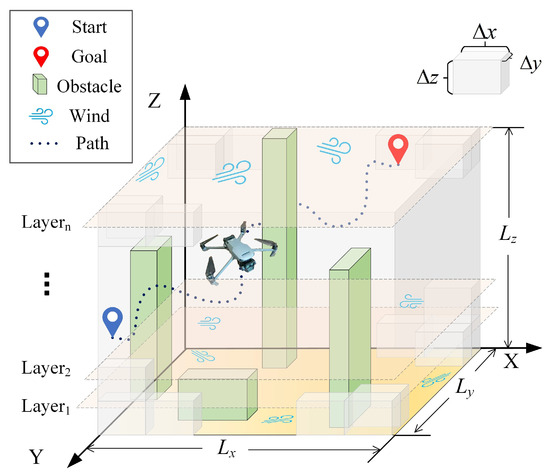
無人機三維路徑規劃場景(圖源網絡)
本文將從風場仿真與低空經濟的交叉技術體系出發,系統闡述計算流體力學、大氣邊界層模擬、風洞驗證等技術如何為低空航線規劃提供科學支撐,并介紹面向這一新興領域的工程化解決方案。
01 風場仿真與低空經濟的交叉技術體系
風場仿真與低空經濟的深度融合,本質上是在傳統的流體力學仿真框架下,引入低空飛行器氣動特性與城市地理環境兩大新變量。這一交叉技術體系由以下五個核心模塊構成。
1.計算流體力學(CFD)仿真
CFD是風場仿真的底層核心技術。通過在三維空間中對納維-斯托克斯方程進行數值離散與求解,可以獲取任意位置的風速、風向、湍流強度等關鍵參數。在低空經濟場景中,CFD仿真需要覆蓋從百米尺度的城市街區到米級尺度的飛行器周圍流場,對計算精度與效率提出了雙重挑戰。
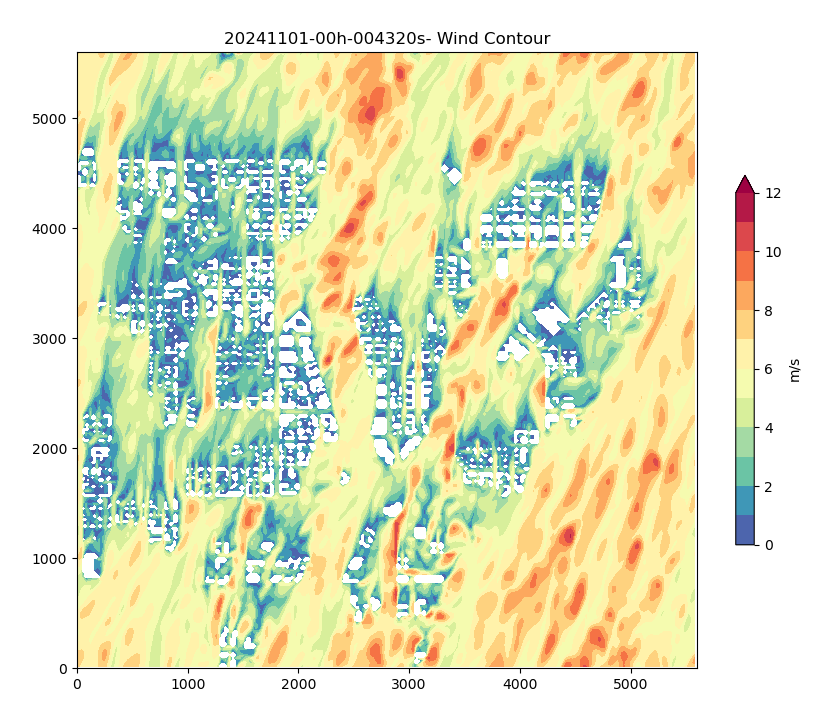
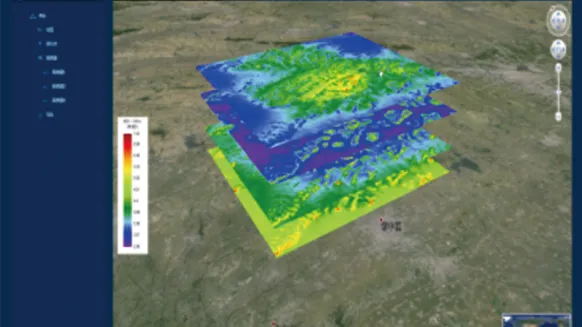
某研究區域的10m高度風場圖,水平空間分辨率為10m
(圖源網絡)
2.大氣邊界層風場模擬
低空飛行器主要活動于大氣邊界層內(地表至約1km高度)。這一區域的風場受地表粗糙度、熱力stratification(層結狀態)、地理地形等因素強烈影響,呈現出顯著的時空不均勻性。大氣邊界層風場模擬需要將氣象學中的邊界層參數化方案與CFD方法耦合,實現對不同穩定度條件下風廓線、湍流結構的準確刻畫。
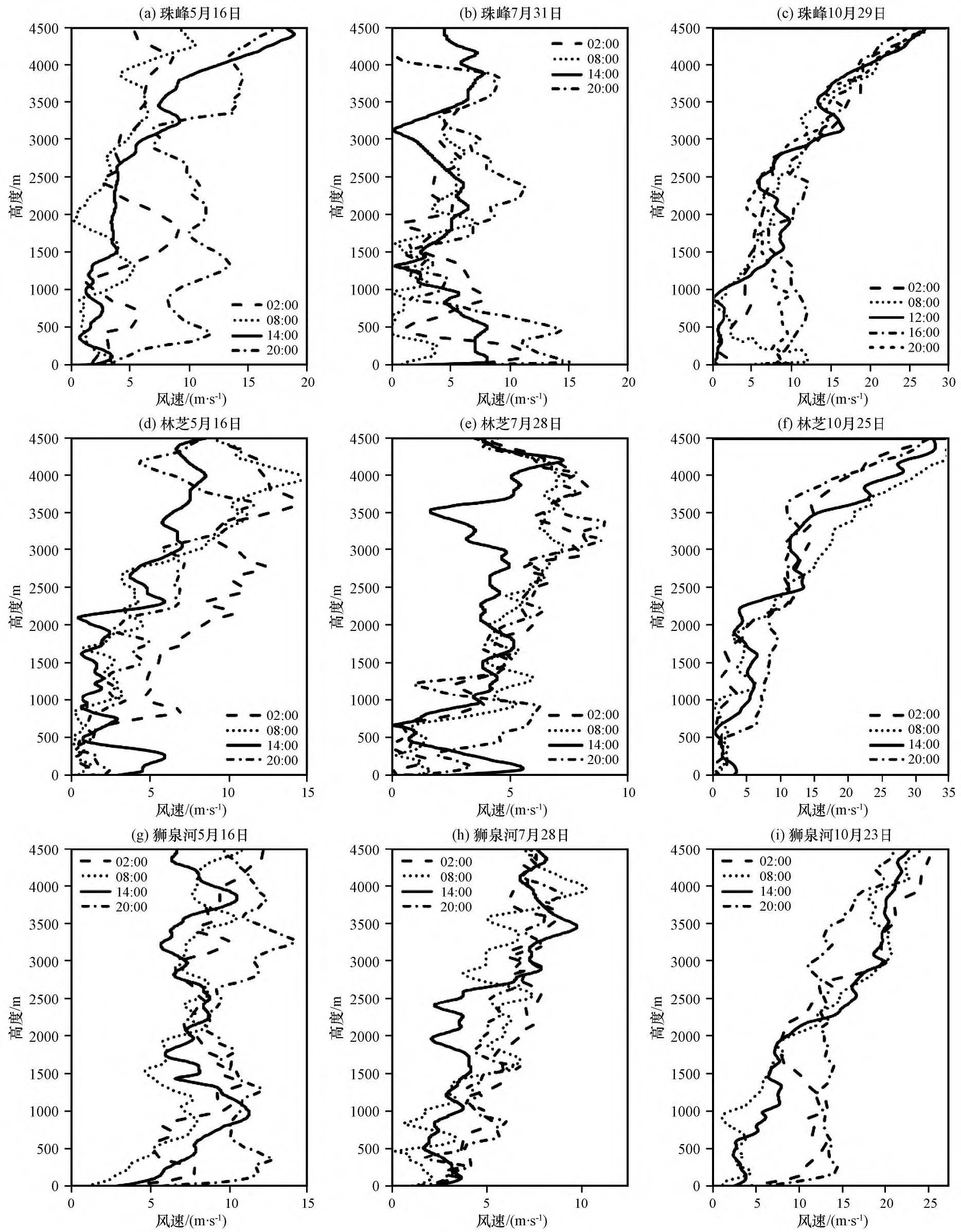
某研究區域風廓線(圖源網絡)
3.城市建筑繞流與湍流仿真
城市環境中,建筑群對來流產生阻塞、繞流、峽谷加速等效應,形成極為復雜的局部風場特征。例如,兩棟高層建筑之間可能產生“文丘里效應”導致風速驟增,建筑背風面則形成大范圍低速回流區。這些特征的空間尺度僅為數米至數十米,卻直接影響飛行器在該區域的姿態穩定與能耗表現。城市建筑繞流仿真需要在CFD模型中精確刻畫建筑幾何,并采用大渦模擬等高級湍流模型解析小尺度渦結構。

高層建筑物間的文丘里效應(圖源網絡)
4.無人機氣動特性仿真
無人機自身的氣動特性決定了其對風場擾動的響應方式。通過求解飛行器周圍流場,可以獲得不同迎角、側滑角下的升力、阻力、力矩系數,進而建立飛行器的動力學模型。在多旋翼與固定翼兩類主要構型中,前者受風場影響時需考慮旋翼與機身的氣動干擾,后者則需要關注機翼表面分離流與失速特性。

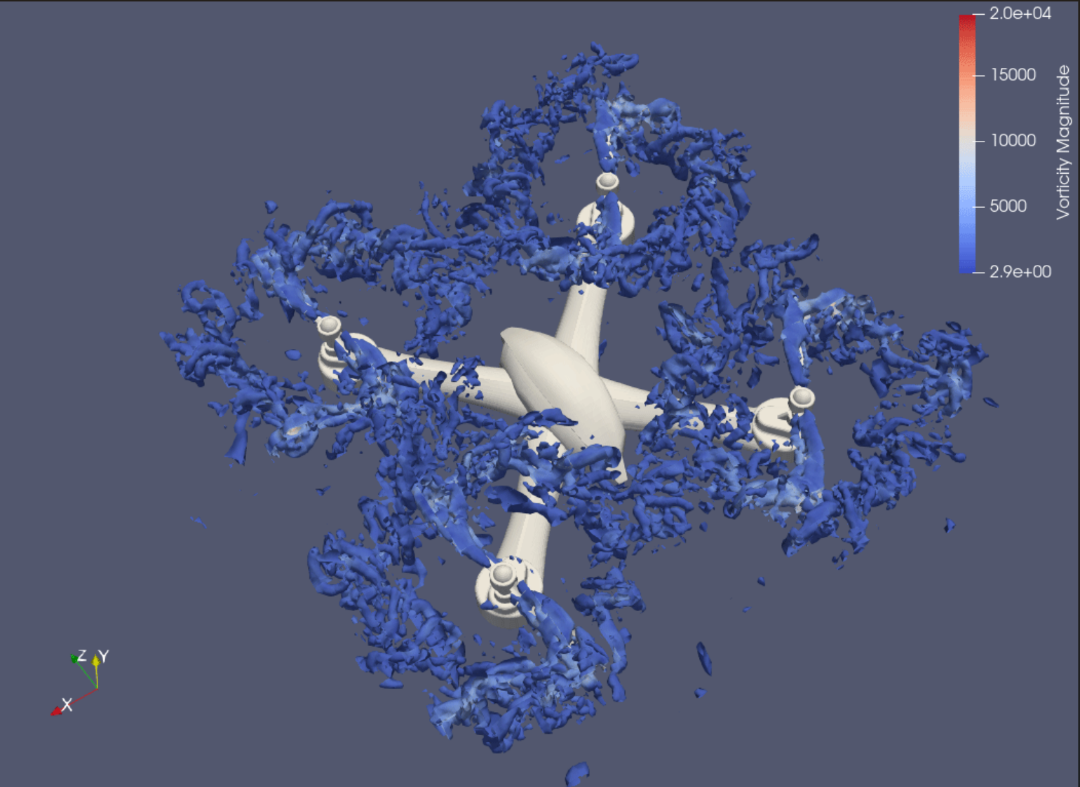
無人機整機氣動仿真云圖(圖源網絡)
5.風洞物理試驗與數字孿生驗證
物理風洞試驗是驗證仿真精度的“金標準”。通過在風洞中縮比復現典型風場條件,測量飛行器模型的氣動響應,可以與CFD仿真結果進行交叉校驗。在此基礎上,數字孿生技術進一步將物理風洞與仿真模型實時聯動,形成“仿真—試驗—修正”的閉環迭代體系,有效提升風場預測與航線規劃的可信度。

無人機風洞試驗(圖源網絡)
02 風場仿真技術在低空經濟領域的應用
基于上述技術體系,風場仿真正從底層重構低空經濟的五大核心場景,實現“被動避障”到“主動能效優化”的跨越。
1.城市低空空域風環境評估
不同城市、不同區域、不同高度的風環境特征差異顯著。通過建立城市尺度的CFD模型,輸入長期氣象觀測數據,可以繪制出“低空風環境地圖”,標注出不同坐標、不同高度的平均風速、陣風系數、湍流強度等關鍵指標。該地圖可作為低空空域劃設、飛行風險分級的量化依據,避免將所有空域“一刀切”管理。
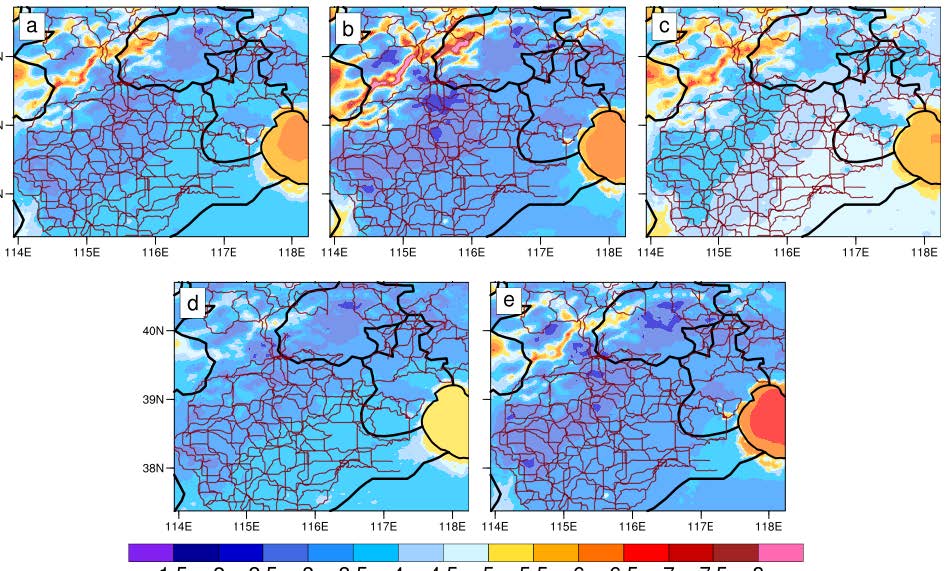
京津冀地區航路網及2015-2019年10m風速分布特征
(圖源網絡)
2.起降場選址與風環境分析
垂直起降場是eVTOL與無人機物流網絡的節點設施,其選址需綜合考慮地面條件、空域資源與風環境。CFD仿真可用于評估候選場址在主導風向下的起降氣流平穩度,識別是否存在建筑物引起的側風、下洗流等不利因素。在風環境不理想的場址,可通過調整起降平臺朝向、增設導流設施等手段進行工程補償。
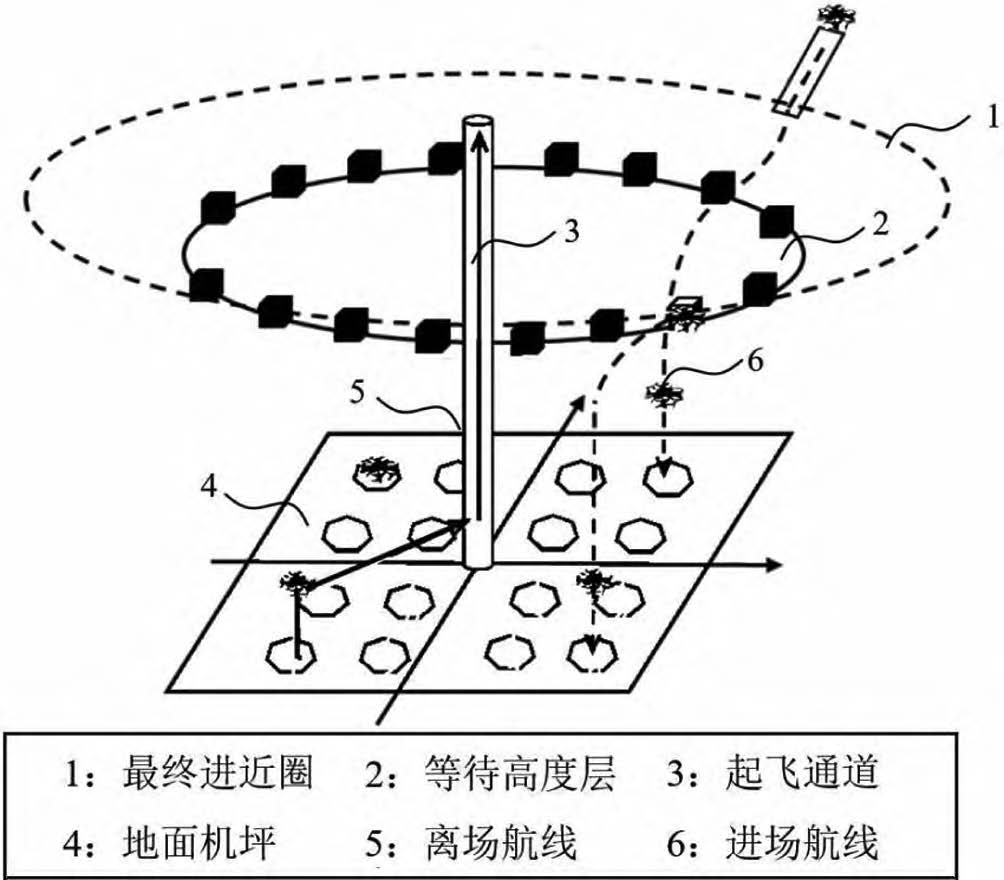
無人機進離場示意圖(圖源網絡)
3.低空基礎設施布局優化
除起降場外,低空經濟還需要充電站、維護基地、通信基站等地面配套設施。這些設施的位置選擇應考慮其所在位置的風沙侵蝕、積雪漂移等長期風致影響。CFD仿真可以評估不同布局方案下的設施暴露度與維護成本,輔助基礎設施網絡的空間優化決策。
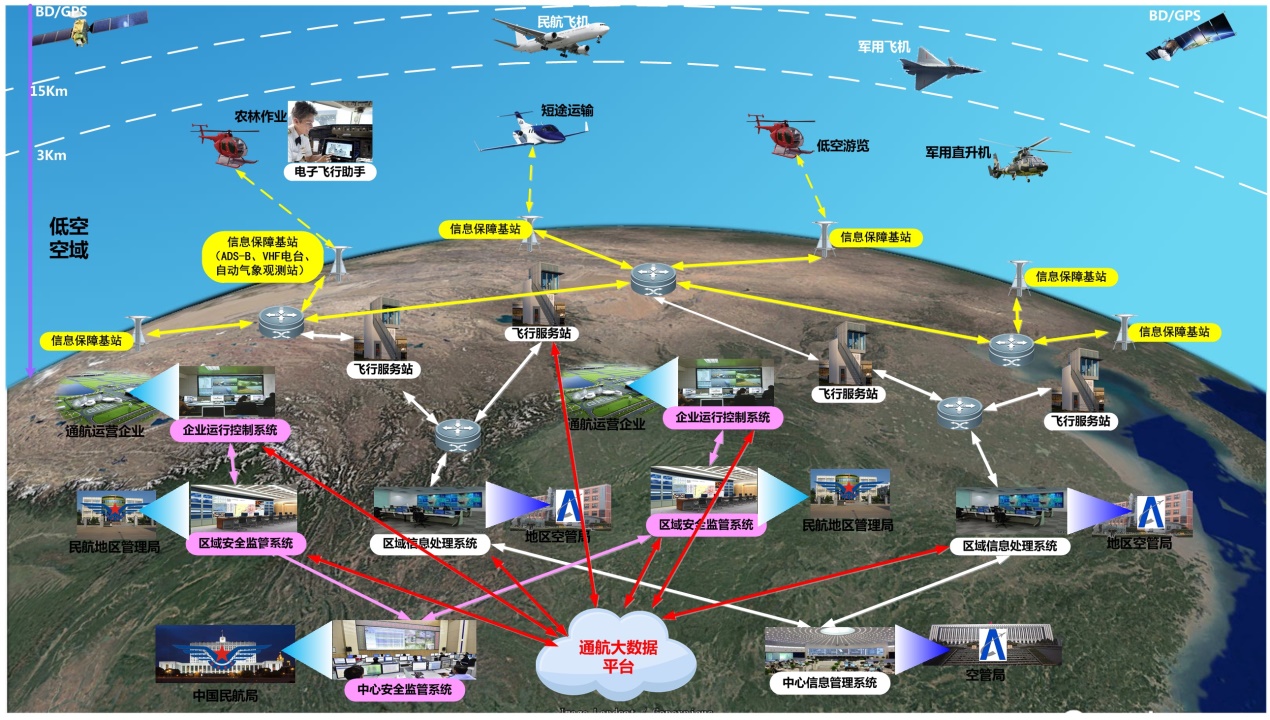
低空經濟基礎設施建設(圖源網絡)
4.低空飛行器航線規劃與風場感知
傳統航線規劃主要考慮障礙物避讓與禁飛區約束,將風場視為靜態背景或完全忽略。風場感知啟用的航線規劃,則將CFD預計算的風場分布圖作為動態權重圖層,嵌入路徑搜索算法。飛行器在執行任務時,可根據實時風場數據調整航向與速度,規避強湍流區,利用順風航段降低能耗。量化研究表明,考慮風場影響的路徑規劃可使地速提升6%以上、能耗降低7%以上。[1]
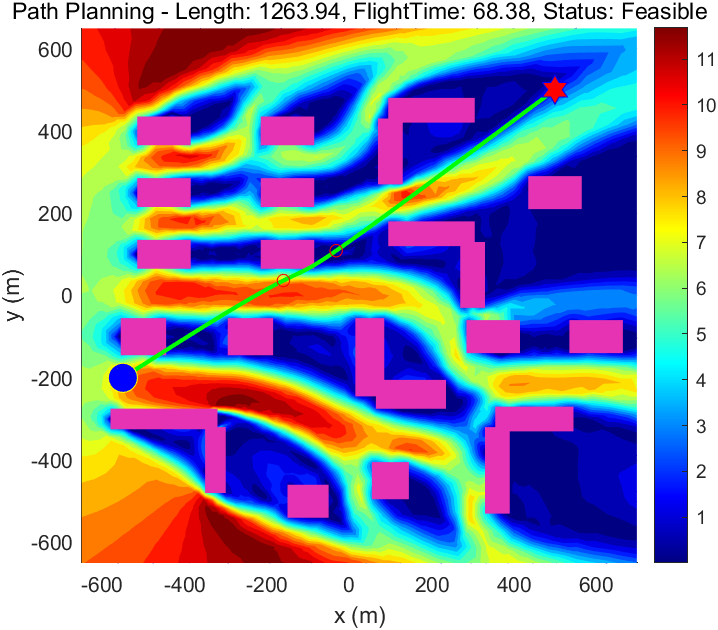
復雜城市風環境中的最終優化無人機航線(圖源網絡)
5.飛行器適航風洞測試
適航認證是低空飛行器商業化運營的法定前提。在風洞中模擬飛行器可能遭遇的極限風況(如側風17m/s、陣風峰值等),測量其姿態保持能力與結構響應,是獲取適航數據的核心手段之一。多風扇主動控制風洞可編程生成非定常、非均勻的風場剖面,比傳統均勻風洞更貼近真實城市風環境。
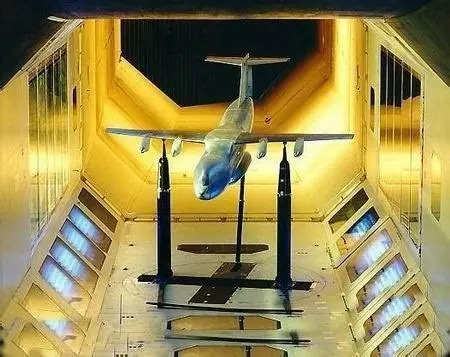
飛行器適航風洞測試(圖源網絡)
03 神工坊?應用案例
1.并行升級:智慧風場數字孿生平臺
某風電整機領域的頭部企業,在風電場開發與運營中積累了大量的風資源項目數據,但其對風場內局部復雜風場的精細模擬能力一直受限于傳統仿真手段的精度與效率。為實現對風機排布區域風資源分布的高分辨率解析,企業需要構建能夠精確刻畫地形繞流、機組尾流及大氣邊界層風廓線的CFD仿真流程,以支撐風電場微觀選址及后續的精細化運維。然而,其原有的軟硬件環境難以滿足大規模、高精度的風場仿真需求。
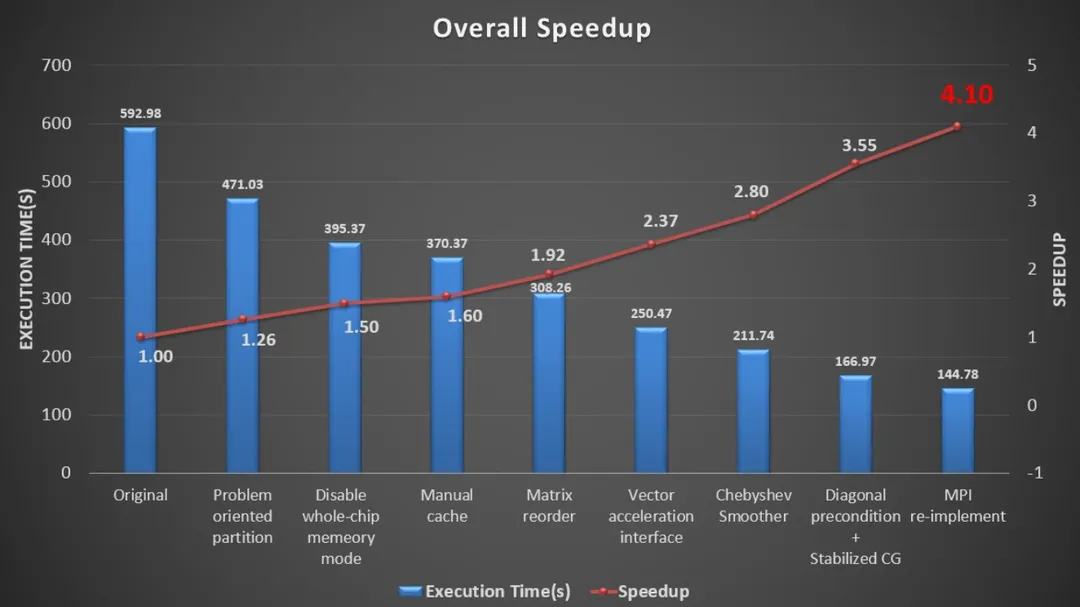
基于“超算+AI”混合數值引擎及SimForge?平臺,神工坊?技術團隊成功對其底層CFD求解器進行了高性能改造與云端部署,使得針對復雜地形的風場仿真計算效率整體提升了4.2倍。這一突破讓風資源工程師得以在合理周期內,完成超過2000個風資源項目的精細化流場模擬,為每個機位點提供了準確的風速、湍流強度等關鍵輸入參數。
此外,該企業還依托平臺,自主研發了風功率預報系統——孔明。該系統已正式發布并推廣,憑借其卓越的性能和實用性,已成為行業內的標桿應用。
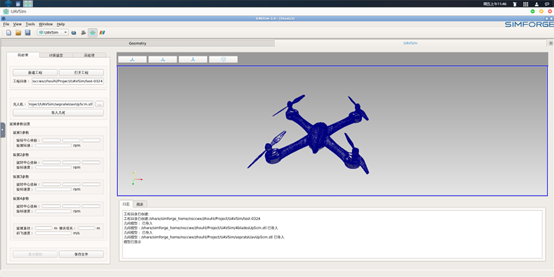
2.應用定制:UAVSim 無人機仿真APP
某無人機制造商在研發新一代無人機時,面臨復雜城市環境下的氣動仿真與飛行安全評估挑戰,急需一款能夠精準模擬無人機在低空復雜流場中行為的仿真軟件。
神工坊?團隊基于SIMFORGE HSF?“超算+AI”混合數值引擎,為其快速定制了一款高度易用、高效求解、精確可靠的無人機仿真App。該軟件提供了完整的幾何清理功能,通過自研網格模塊根據無人機真實工況生成自適應網格,并采用LBM(格子玻爾茲曼方法)求解器,實現了對旋翼機體在各類風場條件下的高精度數值仿真。軟件界面設計簡潔直觀,操作門檻低,產品經理也能快速上手完成仿真任務。
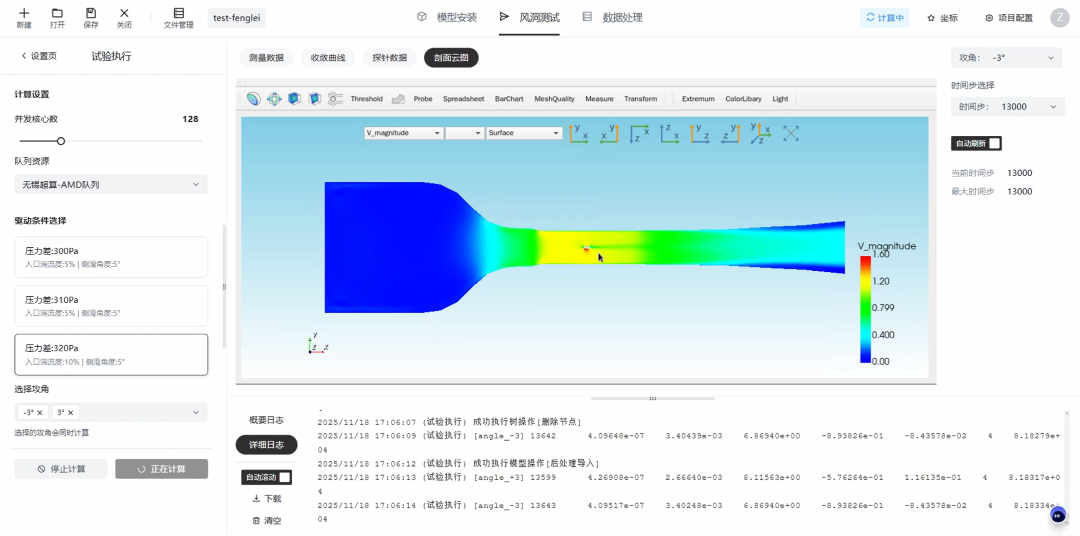
3.應用定制:“風神NF3”數字孿生風洞
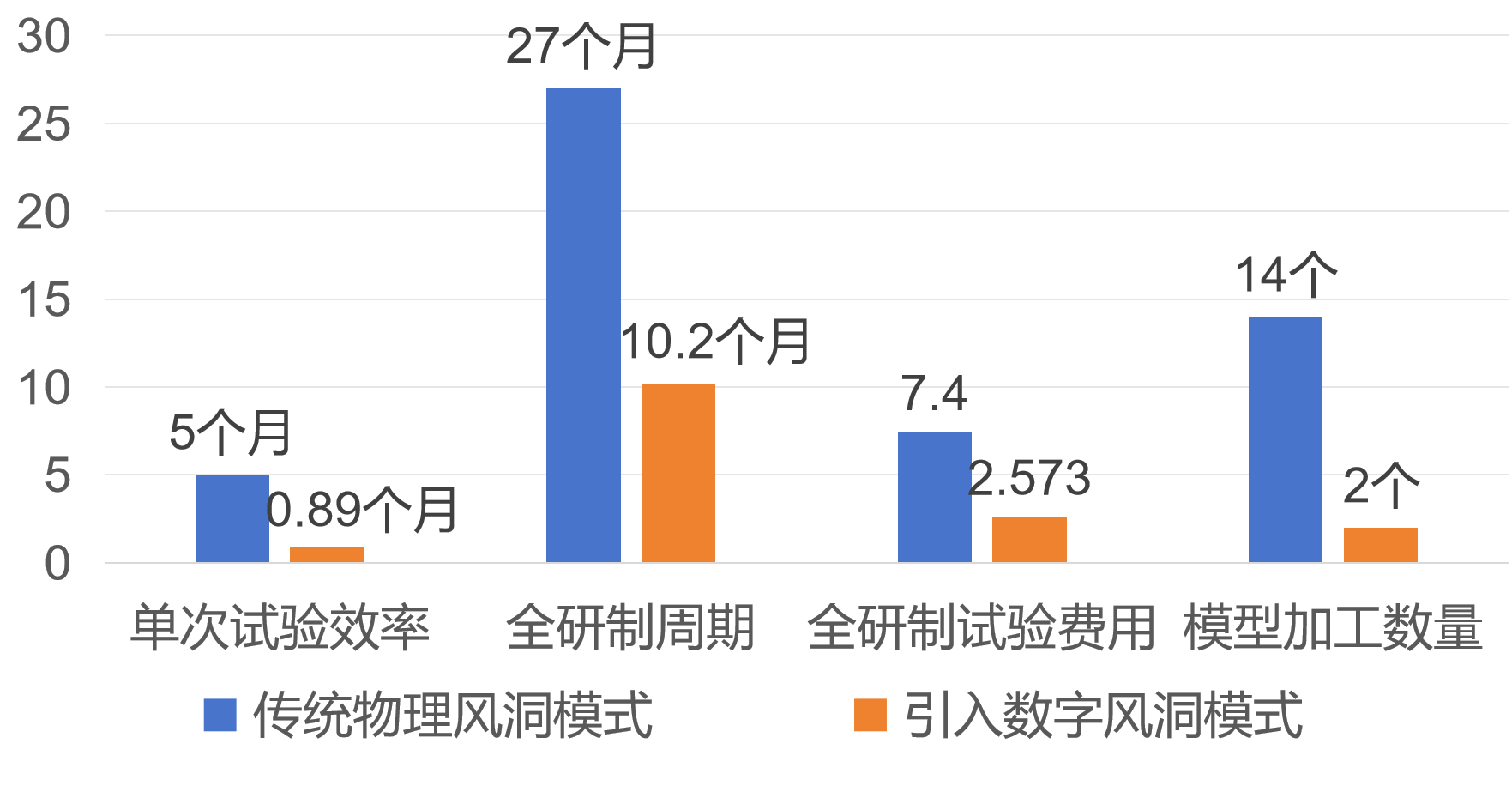
隨著裝備研制技術發展,飛行器適航風洞驗證需求旺盛。傳統物理風洞試驗雖具備高置信度,但存在周期漫長產能不足、排期擁堵(常以年計)、單次試驗成本高昂、縮比模型難以完全復現真實流場等瓶頸,嚴重制約了研發效率。高端裝備研發側急需一種能夠快速反饋、精度可比肩物理試驗的數字化驗證手段,以支撐高頻次的設計迭代。
神工坊?針對上述困境及需求,依托“超算+AI”混合數值引擎基座及數字孿生實驗設施產品生態,完成了“風神NF3”數字孿生風洞研發,實現了“虛實融合”的高效驗證。綜合測算顯示,引入“風神NF3”數字孿生風洞,可縮短研制周期62.2%,降低相關試驗費用65.2%。
04 結語
從破解城市低空湍流風險、保障飛行器安全起降,到優化航線能耗、提升物流運營效率,智慧風場仿真技術為低空經濟提供了從“被動避險”轉向“主動增效”的科學范式。
在國家大力發展低空經濟的戰略指引下,神工坊?將依托“超算+AI”混合數值引擎、數字孿生試驗設施、SimForge?高性能仿真云平臺三大核心產品,讓風場仿真更高效地嵌入航線規劃、起降場選址、適航認證等核心環節,推動構建“風場感知—氣動仿真—航線優化”的技術閉環,為構建安全、高效、綠色的低空飛行生態奠定數字基座。

![[媒介矩陣版尾-2025].png](https://bexp.135editor.com/files/users/1466/14660444/202605/6ZuEnzOk_du8K.png?auth_key=1780243199-0-0-a54b2d598b6a9c3ff5fef2abf17a52b1)
參考資料:
[1] X. Chen, J. Zhang, and Y. Li, "Urban wind-aware path planning for unmanned aerial vehicles using computational fluid dynamics," Chinese Journal of Aeronautics, vol. 36, no. 8, pp. 245–258, Aug. 2023, doi: 10.1016/j.cja.2023.05.012.
[2] Lian, F., Li, B., Yang, Q., Zhu, H., & Du, D. (2025). WA-LPA*: An Energy-Aware Path-Planning Algorithm for UAVs in Dynamic Wind Environments. Drones, 9(12), 850. https://doi.org/10.3390/drones9120850
[3] 伏薇,李茂善,陰蜀城,等,2022. 西風南支與高原季風環流場下青藏高原大氣邊界層結構研究[J]. 高原氣象,41(1):190-203.
[4] 鐘若嵋, 廖小罕, 徐晨晨, 文小航. 2021: 京津冀地區無人機低空航路氣象環境模擬研究. 氣象科技進展, 11(4): 147-155. DOI: 10.3969/j.issn.2095-1973.2021.04.021
[5] J. Gao, X. Liu, Y. Xia, S. Shang, T. Pang and B. Yang, A Wind-Aware Path Planning Method for UAVs in Urban Environments, 2026 2nd International Conference on Electrical Automation and Artificial Intelligence (ICEAAI), Guangzhou, China, 2026, pp. 1-4, doi: 10.1109/ICEAAI68945.2026.11442519.





















工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




