



挖掘機(jī)多體動(dòng)力學(xué)仿真 
圖7 驅(qū)動(dòng)類型 INTESIM-FMBD軟件內(nèi)置豐富的函數(shù)庫(kù),支持上百種函數(shù)類型,本案例結(jié)合挖掘機(jī)挖掘、卸載及復(fù)位整個(gè)工作循環(huán)運(yùn)動(dòng)規(guī)律,選用STEP函數(shù)組合分別創(chuàng)建挖掘機(jī)4個(gè)時(shí)序驅(qū)動(dòng),主要分為機(jī)艙轉(zhuǎn)動(dòng)時(shí)序控制、動(dòng)臂油缸時(shí)序控制驅(qū)動(dòng)、斗桿油缸時(shí)序控制驅(qū)動(dòng)及鏟斗油缸時(shí)序控制驅(qū)動(dòng),基于INTESIM-FMBD軟件的挖掘機(jī)4個(gè)時(shí)序驅(qū)動(dòng)施加分別如下圖所示。
3747 3
CAE仿真學(xué)習(xí)菌 ??? 2年前
淺析純電動(dòng)汽車驅(qū)動(dòng)電機(jī)控制系統(tǒng)的控制過(guò)程 
④運(yùn)行方向控制:通過(guò)改變逆變器中控制模塊的導(dǎo)通順序就可以改變輸出三相交流電的相序,即改變了三相異步電動(dòng)機(jī)定子三相繞組所接交流電的相序,三相異步電動(dòng)機(jī)反轉(zhuǎn),從而改變汽車的運(yùn)行方向。 ⑤驅(qū)動(dòng)與制動(dòng)控制:通過(guò)改變逆變器輸出三相交流電的頻率,改變?nèi)喈惒诫妱?dòng)機(jī)的轉(zhuǎn)差頻率的正負(fù),控制三相異步電動(dòng)機(jī)是處于電動(dòng)機(jī)狀態(tài)還是發(fā)電機(jī)狀態(tài),從而控制汽車的驅(qū)動(dòng)和制動(dòng)。
2958
洋娃娃和小熊 ??? 4年前
MBSE建模應(yīng)用案例和實(shí)踐經(jīng)驗(yàn):挖掘機(jī)傾覆解決方案(工業(yè)設(shè)備行業(yè)MBSE方法實(shí)踐) 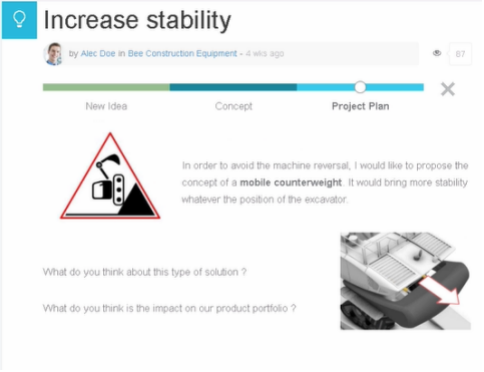
通過(guò)虛擬驗(yàn)證,可移動(dòng)配重保證了挖掘機(jī)的穩(wěn)定性。 仿真驗(yàn)證是針對(duì)具體的物理系統(tǒng)行為進(jìn)行的,比如車輛控制系統(tǒng)、傳動(dòng)系統(tǒng)等。
4449
一起學(xué)MBSE ??? 2年前
機(jī)器人/舞臺(tái)燈常用電機(jī)驅(qū)動(dòng)控制芯片SS6810R 
所采用的關(guān)節(jié)驅(qū)動(dòng)電動(dòng)機(jī)主要是AC伺服電動(dòng)機(jī),步進(jìn)電動(dòng)機(jī)和DC伺服電動(dòng)機(jī)。(圖片來(lái)源:無(wú)版權(quán)圖庫(kù))其中,交流伺服電動(dòng)機(jī)、直流伺服電動(dòng)機(jī)、直接驅(qū)動(dòng)電動(dòng)機(jī)(DD)均采用位置閉環(huán)控制,一般應(yīng)用于高精度、高速度的機(jī)器人驅(qū)動(dòng)系統(tǒng)中。步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)系統(tǒng)多適用于對(duì)精度、速度要求不高的小型簡(jiǎn)易機(jī)器人開(kāi)環(huán)系統(tǒng)中。交流伺服電動(dòng)機(jī)由于采用電子換向,無(wú)換向火花,在易燃易爆環(huán)境中得到了廣泛的使用。
2211
工采電子 ??? 3年前
驅(qū)動(dòng)鈦絲(SMA)的可靠性設(shè)計(jì)(9)鈦絲的驅(qū)動(dòng)電路控制(下) 
注意事項(xiàng):無(wú) 應(yīng)用案例:手機(jī)鏡頭防抖、云臺(tái)防抖、機(jī)器人、無(wú)人機(jī)拓展功能、汽車風(fēng)路控制、汽車流體控制。9.【任意定位驅(qū)動(dòng)控制】 工作原理: 任意定位驅(qū)動(dòng)控制是在溫度閉環(huán)控制設(shè)計(jì)的基礎(chǔ)上,做更加精細(xì)的軟件控制思路實(shí)現(xiàn)位移或定位的精準(zhǔn)控制。
2359
財(cái)哥說(shuō)鈦絲 ??? 1年前
10鈦絲驅(qū)動(dòng)技術(shù)(NiTiDrivetech)-電路驅(qū)動(dòng)設(shè)計(jì)(下) 
注意事項(xiàng):無(wú) 應(yīng)用案例:手機(jī)鏡頭防抖、云臺(tái)防抖、機(jī)器人、無(wú)人機(jī)拓展功能、汽車風(fēng)路控制、汽車流體控制。9.【任意定位驅(qū)動(dòng)控制】 工作原理: 任意定位驅(qū)動(dòng)控制是在溫度閉環(huán)控制設(shè)計(jì)的基礎(chǔ)上,做更加精細(xì)的軟件控制思路實(shí)現(xiàn)位移或定位的精準(zhǔn)控制。
1858
財(cái)哥說(shuō)鈦絲 ??? 2月前
深度解讀混合動(dòng)力汽車雙電機(jī)驅(qū)動(dòng)系統(tǒng) 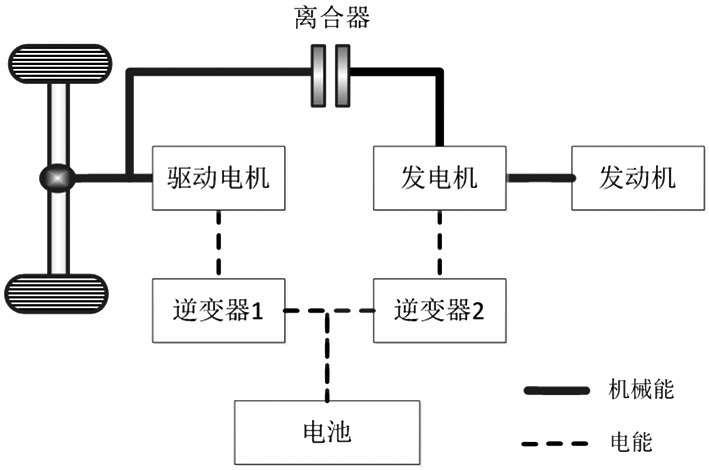
此時(shí)車輛處于行駛狀態(tài),發(fā)動(dòng)機(jī)工作,發(fā)電機(jī)工作,驅(qū)動(dòng)電機(jī)驅(qū)動(dòng),3個(gè)動(dòng)力源同時(shí)驅(qū)動(dòng)車輛。圖8(4)模式切換控制從整車的經(jīng)濟(jì)性和動(dòng)力性方面而言,采用EDU雙電機(jī)系統(tǒng),可以基于雙離合器C1及C2,控制協(xié)調(diào)各子系統(tǒng),適時(shí)選擇相應(yīng)的驅(qū)動(dòng)電機(jī)、發(fā)電機(jī)及發(fā)動(dòng)機(jī)動(dòng)力源輸入,最終實(shí)現(xiàn)純電動(dòng)、串聯(lián)、并聯(lián)和能量回收等模式功能的切換。
2197
EDC電驅(qū)未來(lái) ??? 3年前
行業(yè)標(biāo)準(zhǔn)IN/IN數(shù)字控制接口的雙通道H橋電流控制電機(jī)驅(qū)動(dòng)器-SS8844T 
SS8844T是一款步進(jìn)電機(jī)驅(qū)動(dòng)IC,不僅擁有雙通道H橋電流控制功能,更廣泛適用于紡織機(jī)器、工業(yè)自動(dòng)化、游戲機(jī)和機(jī)器人等多種場(chǎng)景;可可pin-to-pin兼容替代市面上的TI-DRV8844和瑞盟MS8844等型號(hào)應(yīng)用于舞臺(tái)燈、工業(yè)設(shè)備、機(jī)器人、辦公自動(dòng)化設(shè)備。提供更穩(wěn)定和可靠的性能。
1190
如果我年少有為 ??? 2月前
案例19 挖掘機(jī)臂裝配體的瞬態(tài)動(dòng)力學(xué)分析 
分析和求解控制 對(duì)挖掘機(jī)臂裝配體進(jìn)行兩個(gè)非線性瞬態(tài)分析,分析中包含有限變形和大轉(zhuǎn)動(dòng)效應(yīng)。
3398 8 1
龍飛宇 ??? 3年前
淺析新能源汽車驅(qū)動(dòng)電機(jī) 
4 電機(jī)控制系統(tǒng)電機(jī)驅(qū)動(dòng)系統(tǒng)的主要特點(diǎn)及其功能介紹:(1)作為電動(dòng)汽車的三大核心部件之一,電機(jī)驅(qū)動(dòng)系統(tǒng)是車輛行駛的主要執(zhí)行機(jī)構(gòu),對(duì)車輛的主要性能指標(biāo)起決定性作用,電機(jī)驅(qū)動(dòng)系統(tǒng)直接影響車輛的舒適性、動(dòng)力性和經(jīng)濟(jì)性。(2)采用三相交流永磁電動(dòng)機(jī)(DM)、電機(jī)控制器(MCU)可調(diào)整輸出電流和電動(dòng)機(jī)轉(zhuǎn)速,電機(jī)和電機(jī)控制器采用水冷方式防止溫度過(guò)高。
3125
EDC電驅(qū)未來(lái) ??? 4年前
9 鈦絲驅(qū)動(dòng)技術(shù)(NiTiDrivetech)--電路驅(qū)動(dòng)設(shè)計(jì)(上) 
注意事項(xiàng) 需控制驅(qū)動(dòng)機(jī)構(gòu)和供電系統(tǒng)之間的連接線路阻值盡量小,否則可能會(huì)導(dǎo)致驅(qū)動(dòng)機(jī)構(gòu)供電電壓不足。 應(yīng)用案例:無(wú)人售貨機(jī)鎖、快遞柜鎖、箱包鎖、指紋鎖、記事本鎖等簡(jiǎn)易開(kāi)合機(jī)構(gòu)。5.【恒功驅(qū)動(dòng)控制】 工作原理: 恒功控制是利用了焦耳定律的Q=I2Rt,熱功率=電流2×電阻×?xí)r間。驅(qū)動(dòng)系統(tǒng)的MCU下達(dá)驅(qū)動(dòng)指令后,MCU發(fā)出可控的PWM波,驅(qū)動(dòng)開(kāi)關(guān)作用的MOS管工作。
1595
財(cái)哥說(shuō)鈦絲 ??? 3月前
新能源汽車四種常用電機(jī)驅(qū)動(dòng)系統(tǒng)詳解 
電機(jī)驅(qū)動(dòng)控制系統(tǒng)是新能源汽車車輛行使中的主要執(zhí)行結(jié)構(gòu),其驅(qū)動(dòng)特性決定了汽車行駛的主要性能指標(biāo),它是電動(dòng)汽車的重要部件。電動(dòng)汽車的整個(gè)驅(qū)動(dòng)系統(tǒng)包括電動(dòng)機(jī)驅(qū)動(dòng)系統(tǒng)與其機(jī)械傳動(dòng)機(jī)構(gòu)兩個(gè)部分。電機(jī)驅(qū)動(dòng)系統(tǒng)主要由電動(dòng)機(jī)、功率轉(zhuǎn)換器、控制器、各種檢測(cè)傳感器以及電源等部分構(gòu)成,結(jié)構(gòu)如下圖2所示。
3294 1 1
走遍山河 ??? 4年前
舞臺(tái)燈電機(jī)驅(qū)動(dòng)芯片_步進(jìn)驅(qū)動(dòng)ic-選型指南_應(yīng)用方案 
工采網(wǎng)代理了多款步進(jìn)馬達(dá)驅(qū)動(dòng)芯片,專為舞臺(tái)燈光設(shè)計(jì),采用PWM控制,完美滿足舞臺(tái)燈光設(shè)備的控制需求;適用于各類電機(jī),具有出色的性能和穩(wěn)定性,廣泛應(yīng)用于舞臺(tái)照明等領(lǐng)域。
1985
工采電子 ??? 1年前
PMSM電機(jī)結(jié)構(gòu)及控制原理 
永磁同步電動(dòng)機(jī) (PMSM) —是一種同步電動(dòng)機(jī),其電感器由永磁體組成。永磁同步電機(jī) (PMSM) 和感應(yīng)電機(jī)之間的主要區(qū)別在于轉(zhuǎn)子。研究表明 PMSM 的效率比高效(IE3)感應(yīng)電動(dòng)機(jī)高約 2%,前提是定子具有相同的設(shè)計(jì),并使用相同的變頻驅(qū)動(dòng)器進(jìn)行控制。 在這種情況下,永磁同步電動(dòng)機(jī)與其他電動(dòng)機(jī)相比具有最佳性能:功率/體積、扭矩/慣量等。
5257 10 5
AutoEuler ??? 4年前
豐田THS-II混合動(dòng)力核心控制策略介紹(一) 
下面我們將以Lexus CT200h車型為例對(duì)各個(gè)子系統(tǒng)的工作原理和控制策略一一進(jìn)行深入研習(xí)。一、驅(qū)動(dòng)力控制系統(tǒng)如圖3所示,驅(qū)動(dòng)力控制的輸入信號(hào)有加速踏板開(kāi)度、車速、換擋桿位置、HV蓄電池的充電狀態(tài)(SOC)等控制輸出信號(hào)包括發(fā)動(dòng)機(jī)的要求動(dòng)力、發(fā)電機(jī)扭矩以及電動(dòng)機(jī)扭矩等。
3598 1
EDC電驅(qū)未來(lái) ??? 4年前
6 鈦絲驅(qū)動(dòng)技術(shù)(NiTiDrivetech)的可靠性設(shè)計(jì)-溫度控制 
鈦絲驅(qū)動(dòng)技術(shù)(nitidrivetech)目前已經(jīng)在航空航天、醫(yī)療、無(wú)人機(jī)、手機(jī)、汽車、機(jī)器人等科技領(lǐng)域投入使用。 本文通過(guò)公開(kāi)分享、科普鈦絲驅(qū)動(dòng)技術(shù)的可靠性設(shè)計(jì)經(jīng)驗(yàn),方便大家在機(jī)械電子工業(yè)設(shè)計(jì)等領(lǐng)域快速有效地轉(zhuǎn)化為科技成果。六、溫度控制和設(shè)計(jì) 鈦絲通過(guò)通電加熱,當(dāng)溫度達(dá)到某個(gè)區(qū)域時(shí),發(fā)生明顯的收縮,對(duì)應(yīng)的溫度區(qū)域即為鈦絲的相變溫度。
2450
財(cái)哥說(shuō)鈦絲 ??? 6月前
混合動(dòng)力電動(dòng)汽車電驅(qū)動(dòng)結(jié)構(gòu)與特征 附車輛與結(jié)構(gòu)動(dòng)力相互作用下載 
存在缺點(diǎn):1主要驅(qū)動(dòng)模式是靠發(fā)動(dòng)機(jī)驅(qū)動(dòng),因此傳動(dòng)系統(tǒng)與內(nèi)燃機(jī)汽車基本相似,發(fā)動(dòng)機(jī)的廢氣排放高于串聯(lián)式;2傳動(dòng)系統(tǒng)除傳統(tǒng)組件,如:離合器、變速器、傳動(dòng)軸和驅(qū)動(dòng)器等,還有驅(qū)動(dòng)電機(jī)、電池組、動(dòng)力耦合裝置,結(jié)構(gòu)更加復(fù)雜,控制困難。3.3 總結(jié)因此,并聯(lián)式驅(qū)動(dòng)系統(tǒng)最適合高速、大功率行駛,工況穩(wěn)定,價(jià)格較低,因此,在電池技術(shù)問(wèn)題徹底解決之前,它會(huì)成為新能源汽車產(chǎn)業(yè)的主流產(chǎn)品。
2404 1 1
無(wú)敵清夢(mèng) ??? 4年前
一文了解電動(dòng)汽車用驅(qū)動(dòng)電機(jī)系統(tǒng)超速試驗(yàn) 
4、超速試驗(yàn)可根據(jù)具體情況選用被試驅(qū)動(dòng)電機(jī)空載自轉(zhuǎn)或原動(dòng)機(jī)(測(cè)功機(jī))拖動(dòng)法。a)采用被試驅(qū)動(dòng)電機(jī)空載自轉(zhuǎn)的方法:試驗(yàn)時(shí),被試驅(qū)動(dòng)電機(jī)在驅(qū)動(dòng)電機(jī)控制器的控制下,平穩(wěn)旋轉(zhuǎn)至1.2倍最高工作轉(zhuǎn)速,并在此轉(zhuǎn)速點(diǎn)空載運(yùn)行不低于2min。b)采用原動(dòng)機(jī)(測(cè)功機(jī))拖動(dòng)法:被試驅(qū)動(dòng)電機(jī)不通電,在原動(dòng)機(jī)(測(cè)功機(jī))拖動(dòng)下平穩(wěn)旋轉(zhuǎn)至1.2倍最高工作轉(zhuǎn)速,并在此轉(zhuǎn)速點(diǎn)空載運(yùn)行不低于2min。
2753 1 2
EDC電驅(qū)未來(lái) ??? 3年前
每個(gè)H橋可提供輸出電流1.6A的雙通道H橋電流控制電機(jī)驅(qū)動(dòng)器-SS8812T 
電流控制通常通過(guò)檢測(cè)電機(jī)電流反饋(如使用采樣電阻)來(lái)調(diào)節(jié)PWM,確保輸出電流穩(wěn)定,避免過(guò)載。? 工采網(wǎng)代理的SS8812T是一款為打印機(jī)和其它電機(jī)一體化應(yīng)用提供一種雙通道集成電機(jī)驅(qū)動(dòng)方案。
2460
如果我年少有為 ??? 6月前
加快人工智能融入現(xiàn)代指揮決策,推動(dòng)軍事指揮決策水平提升 
單純的人腦決策已經(jīng)難以適應(yīng)現(xiàn)代戰(zhàn)爭(zhēng)節(jié)奏,需要積極借助人工智能,通過(guò)人機(jī)協(xié)同互補(bǔ),實(shí)現(xiàn)軍事指揮決策的快速高效。數(shù)據(jù)驅(qū)動(dòng)式?jīng)Q策,著眼大數(shù)據(jù)資源進(jìn)行數(shù)據(jù)挖掘與綜合研析,從中發(fā)現(xiàn)數(shù)據(jù)關(guān)聯(lián)、未知規(guī)律并據(jù)此輔助指揮員進(jìn)行決策。自主式?jīng)Q策依托大數(shù)據(jù)分析平臺(tái),感知、認(rèn)知和決策支持相結(jié)合,在確保時(shí)效性基礎(chǔ)上,精確生成并優(yōu)選決策方案。
2004
DSJ123 ??? 3年前
20條/頁(yè) 
 70
70 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
