



基于Simdroid實(shí)現(xiàn)高壓穿墻套管內(nèi)部溫度動態(tài)感知 
結(jié)合電磁場結(jié)果,工程師可以了解焦耳發(fā)熱量的分布,以便在設(shè)備設(shè)計(jì)中更好地考慮散熱性能;結(jié)合溫度場結(jié)果,工程師結(jié)合溫度傳感器監(jiān)測數(shù)據(jù),可在穿墻套管運(yùn)行中外殼溫度發(fā)生變化時迅速開展參數(shù)掃描以推算內(nèi)部載荷或材料參數(shù)當(dāng)前可能正在發(fā)生的變化,以便開展動態(tài)的狀態(tài)評估或故障診斷,為制定和優(yōu)化運(yùn)維策略提供依據(jù)。
2318 2 1
仿真APP ??? 2年前
自動駕駛系統(tǒng)中視覺感知模塊的安全測試 
,奠定了靜態(tài)的基于場景測試的基礎(chǔ).然而,其模擬環(huán)境較為固定,缺乏動態(tài)行為,同時對于非實(shí)體對象(如天氣)的描述缺少自由度.基于實(shí)時渲染引擎的場景驅(qū)動的安全測試的最新工作,Paracosm在Scenic的基礎(chǔ)上,提出了基于隨機(jī)搜索的動態(tài)場景生成方法來進(jìn)行視覺感知模塊的安全測試.由于該動態(tài)場景搜索方法相對簡單,對待測試視覺感知模塊的適應(yīng)性不足,因此,安全問題的搜索過程不夠高效.本文在前述工作的基礎(chǔ)上,提出了一種基于結(jié)果反饋的動態(tài)場景搜索算法
1831
木火柴 ??? 4年前
北理工研制機(jī)械狗全地形自適應(yīng),無需額外視覺感知,可在復(fù)雜地形中如履平地 
該機(jī)械狗目前能夠進(jìn)行多種動態(tài)運(yùn)動和無感知地形適應(yīng),身上安裝的那只機(jī)械臂也會帶來無限期待,未來研究人員計(jì)劃優(yōu)化機(jī)械狗的高動態(tài)運(yùn)動,也許有一天能看到它在草地上一邊揮舞著機(jī)械臂,一邊奔跑、跳躍的身影。
3207
無人機(jī)10086 ??? 4年前
基于AQWA的水下大尺度拖纜空間形位仿真分析 
由于感知纜的密度較小,僅比海水略高,整體纜索的下沉主要靠傳輸纜的重力實(shí)現(xiàn),傳輸纜的下沉斜率比感知纜的下沉斜率大。在動態(tài)工況下,不同航速下艉部導(dǎo)纜器縱向運(yùn)動時歷曲線見圖6~圖9,在疊加四級海況之后,由于海浪的波高較大,艉部的響應(yīng)也較大。不同航速下艉部運(yùn)動幅值與平均搖動周期見表5。
5405 6 3
泡沫oO ??? 2年前
251 基于matlab的動態(tài)粒子群算法 
基于matlab的動態(tài)粒子群算法。普通粒子群算法無法感知外界環(huán)境的變化,在外界環(huán)境發(fā)生改變時無法實(shí)時進(jìn)行響應(yīng),因而缺乏動態(tài)環(huán)境尋優(yōu)能力。在普通粒子群算法基本上通過增加敏感粒子得到一種動態(tài)粒子群算法,該算法通過實(shí)時計(jì)算敏感粒子的適應(yīng)度值從而感知外界環(huán)境的變化,當(dāng)外界環(huán)境的變化超過一定的閾值時算法以按一定比例更新速度和粒子的方式進(jìn)行相應(yīng),從而具有動態(tài)環(huán)境尋優(yōu)的功能。
2196
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
感知·決策·執(zhí)行——“2026北京具身智能技術(shù)展覽會”即將啟幕 
決策技術(shù)展區(qū)重點(diǎn)呈現(xiàn)具身大模型、深度學(xué)習(xí)算法、路徑規(guī)劃系統(tǒng)等創(chuàng)新成果,多家企業(yè)將發(fā)布集成大語言模型與具身智能的解決方案,讓機(jī)器人實(shí)現(xiàn)常識推理與動態(tài)任務(wù)規(guī)劃,推動機(jī)器人從“自動化工具”向“自主化伙伴”加速演進(jìn)。
1379
數(shù)字中國產(chǎn)業(yè)展會 ??? 2月前
場景采集感知測評軟件 INTEWORK-ARS 
INTEWORK-ARS是經(jīng)緯恒潤自主研發(fā)的智能駕駛場景采集感知測評軟件,具有多個軟件模塊,可提供給使用者進(jìn)行原始數(shù)據(jù)采集、傳感器標(biāo)定、感知計(jì)算、數(shù)據(jù)集生成、傳感器測評、場景生成等相關(guān)開發(fā)應(yīng)用。
1940
經(jīng)緯恒潤 ??? 4年前
系統(tǒng)級仿真 | Ansys聯(lián)合Onsemi推動車輛感知能力的未來發(fā)展 
AVxcelerate Sensors為onsemi傳感器提供了基于物理的、適用于動態(tài)場景的多光譜光傳播仿真,使其能夠快速準(zhǔn)確地測試和驗(yàn)證性能,而無需物理原型。</p><p><br></p><p>AVxcelerate Sensors使onsemi能夠在產(chǎn)品定義和設(shè)計(jì)階段,就對各種場景進(jìn)行綜合全面的驗(yàn)證。
2323
Ansys中國 ??? 5月前
3DGS技術(shù)詳解(一):3DGS如何融合動態(tài)天氣與光照等環(huán)境因素? 
該技術(shù)不僅實(shí)現(xiàn)了近乎實(shí)時的逼真場景渲染,更在動態(tài)天氣建模、光照變化處理等關(guān)鍵領(lǐng)域取得突破性進(jìn)展,正在重新定義自動駕駛仿真系統(tǒng)的能力邊界。本文將系統(tǒng)梳理3DGS從靜態(tài)重建到動態(tài)環(huán)境建模的技術(shù)演進(jìn),并探討其在自動駕駛仿真中的實(shí)踐應(yīng)用。
2293
康謀keymotek ??? 4月前
康謀方案 | BEV感知技術(shù):多相機(jī)數(shù)據(jù)采集與高精度時間同步方案 
為了更靈活應(yīng)對實(shí)際采集環(huán)境需求,對相機(jī)(如曝光時間、幀率和分辨率等)參數(shù)進(jìn)行了統(tǒng)一管理和存儲,這些參數(shù)可在節(jié)點(diǎn)啟動時通過配置文件動態(tài)加載,為相機(jī)的初始化提供了靈活性。 圖3:相機(jī)參數(shù)配置為實(shí)現(xiàn)多相機(jī)的同步采集和高效傳輸,我們利用了ROS的多線程和節(jié)點(diǎn)管理功能。通過為每個相機(jī)創(chuàng)建獨(dú)立的采集線程,并啟動采集循環(huán),確保了每個相機(jī)的采集過程獨(dú)立且高效。
2506
康謀keymotek ??? 1年前
威睛光學(xué)極簡多維智能感知相機(jī)將搭載紫微科技飛船出征太空 
該款相機(jī)為“極簡多維智能感知相機(jī)”,由威睛光學(xué)、清華大學(xué)曹良才教授團(tuán)隊(duì)、北京理工大學(xué)張楠教授團(tuán)隊(duì)聯(lián)合研制,具有強(qiáng)度、相位、光譜多維信息獲取功能,鏡頭極簡化設(shè)計(jì)。具備在復(fù)雜環(huán)境中全天時捕捉高清目標(biāo)影像的能力,將為商業(yè)航天的高質(zhì)量發(fā)展提供有力支持。這將是國內(nèi)計(jì)算光學(xué)極簡多維智能感知相機(jī)產(chǎn)品的首次空間飛行。
9
威睛光學(xué) ??? 11小時前
光學(xué) | 仿真推動以人類視覺感知為本的汽車顯示設(shè)計(jì) 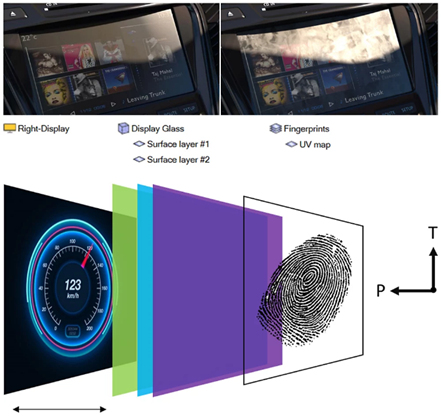
優(yōu)化車輛顯示以終端用戶為中心,因此應(yīng)該重點(diǎn)關(guān)注他們感知周圍世界的方式。 談到功能,在很多設(shè)計(jì)方面都存在改進(jìn)的空間: 字體大小:顯示器設(shè)計(jì)可以減小像素大小適應(yīng)低分辨率,最終以精細(xì)的圖像顯示在屏幕上。 對比度:可讀性會被文本和背景之間的感知對比影響。
2115
Ansys中國 ??? 3年前
Ansys SCADE Vision助力基于人工智能的感知軟件測試與安全提升 

ANSYS 30天密集學(xué)習(xí)計(jì)劃,官方系列課程共16期,更多課程錄播回放點(diǎn)擊鏈接觀看~點(diǎn)擊鏈接觀看:https://m.yqgqt.org.cn/content/post/1196310【掃描下方二維碼,掌握ANSYS官方最新動態(tài)】
2342
Ansys中國 ??? 6年前
客戶案例 | Ansys與索尼半導(dǎo)體解決方案公司合作推進(jìn)自動駕駛汽車基于場景的感知測試 
該合作使OEM廠商和一級供應(yīng)商能夠可靠地評估和驗(yàn)證 ADAS/AV 功能在各種天氣和照明條件下的性能主要亮點(diǎn) Ansys AVxcelerate Sensors?自動駕駛汽車(AV)傳感器仿真軟件,可實(shí)現(xiàn)面向基于場景的感知測試的實(shí)時多光譜攝像頭仿真 利用AVxcelerate Sensors和索尼的高動態(tài)范圍(HDR)圖像傳感器模型,OEM廠商可以測試高級駕駛輔助系統(tǒng)(ADAS
2467
宇熠科技 ??? 1年前
自動駕駛感知仿真與驗(yàn)證之毫米波雷達(dá) 
而毫米波雷達(dá),正是一種具有高頻率工作、高精度識別的微波雷達(dá),可以讓無人駕駛技術(shù)實(shí)現(xiàn)各種高級輔助功能,如并線輔助場景識別、動態(tài)道路場景識別等。本直播將主要介紹毫米波雷達(dá)天線的設(shè)計(jì)難點(diǎn)、設(shè)計(jì)技巧,以及利用ANSYS HFSS軟件中的天線庫、有限大陣列方案,方便快捷地研究與仿真毫米波陣列天線、天線與車體的布局效應(yīng)、動態(tài)道路場景模擬中的感知成像等。
2743 1 1
Ansys中國 ??? 6年前
光刻技術(shù)第20期 | 非線性壓縮感知光源-掩模優(yōu)化技術(shù)及對比分析 
傳統(tǒng)線性壓縮感知(CS)驅(qū)動的SMO技術(shù),因難以精準(zhǔn)刻畫掩模與成像之間的強(qiáng)非線性映射關(guān)系,在復(fù)雜圖形優(yōu)化中常面臨精度不足、工藝窗口收縮等問題,已無法滿足極端制程對優(yōu)化性能的嚴(yán)苛要求。非線性壓縮感知(NCS)理論的興起為突破這一瓶頸提供了關(guān)鍵路徑,其通過構(gòu)建非線性重構(gòu)模型,可更貼合光刻系統(tǒng)的物理本質(zhì)。
2351
武漢二元 ??? 2月前
質(zhì)量管理 | 數(shù)據(jù)驅(qū)動的動態(tài)抽檢助力企業(yè)保質(zhì)降本增效 
這些方法依賴于預(yù)設(shè)的檢驗(yàn)標(biāo)準(zhǔn)和固定的抽樣頻率,其最大的弊端在于缺乏對產(chǎn)品質(zhì)量水平波動的實(shí)時感知和響應(yīng)能力。無論過程質(zhì)量水平高低,檢驗(yàn)資源(人力、時間、設(shè)備)的投入都是一成不變的。
2039
海克斯康設(shè)計(jì)與仿真 ??? 5月前
漲知識!十問“數(shù)字孿生”(二) 
綜上所述,數(shù)字孿生的實(shí)現(xiàn)和落地應(yīng)用離不開 New IT 的支持,只有與 New IT 的深度融合數(shù)字孿生才能實(shí)現(xiàn)物理實(shí)體的真實(shí)全面感知、多維多尺度模型的精準(zhǔn)構(gòu)建、全要素/全流程/全業(yè)務(wù)數(shù)據(jù)的深度融合、智能化/人性化/個性化服務(wù)的按需使用以及全面/動態(tài)/實(shí)時的交互。
2580 7 2
一葉_4024 ??? 4年前
萬字長文解析特斯拉自動駕駛體系 
對于動態(tài)標(biāo)注物,核心是要標(biāo)注其運(yùn)動學(xué)參數(shù)及行為軌跡預(yù)測,通過不同車輛在同一路段采集的含時間序列的視頻標(biāo)注單元,我們不僅可以知道每個標(biāo)注物過去時刻的信息,還可以知道未來時刻的信息,因此可以輕易獲取每個動態(tài)標(biāo)注物運(yùn)動軌跡和參數(shù)的“真值”,即使被遮擋的運(yùn)動物體也可以標(biāo)注出來。
2557
駕駛哥 ??? 4年前
自動駕駛 | Ansys AVxcelerate Sensors利用NI-RDMA進(jìn)行硬件在環(huán)(HiL)測試 
基于仿真原始信號的直接數(shù)據(jù)注入,則提供了一種可行的解決方案,可實(shí)現(xiàn)在HiL工作臺上測試感知功能。用于測試攝像頭芯片的傳統(tǒng)HiL技術(shù),例如OTA攝像頭捕捉技術(shù),不允許工程師保存真實(shí)攝像頭圖像的高動態(tài)或?qū)ζ溥M(jìn)行仿真,尤其是針對夜間駕駛等場景。由于缺少高動態(tài)范圍,攝像頭的圖像信號處理(ISP)無法得到適當(dāng)?shù)募睿虼藖碜孕酒姆聪蛐诺罃?shù)據(jù)無法整合到仿真循環(huán)中。
1413
Ansys中國 ??? 4月前
20條/頁 
 20
20 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
