



Matlab機械連桿機構運動學仿真:包含三桿滑塊機構\四桿\六桿 

詳細介紹了三桿滑塊機構和四桿機構運動方程的推導及matlab對上述機械連桿機構運動仿真,并實現機械連桿機構運動動畫的繪制,注:六桿機構無公式推導文本,只有代碼。如需模型推導說明文本及matlab源碼,請附件下載。
16
SimPC ??? 3年前
210基于matlab的仿真機械四連桿機構運動代碼 
基于matlab的仿真機械四連桿機構運動代碼,包括運動仿真和變量變化分析圖的生成,包括角速度、速度、加速度等曲線。程序已調通,可直接運行。
2307
matlab應用與學習 ??? 2年前
基于Matlab Simulink的三軸運動平臺剛柔耦合仿真 
圖5 剛性模型與剛柔耦合模型工作軸末端位移響應對比本案例采用模態綜合法,在Simulink中構建了三軸運動平臺的剛柔耦合動力學仿真模型。通過與純剛性模型對比,驗證了引入結構柔性對準確預測平臺動態響應的重要性,并有效模擬了其在高速運行中的振動特性。該建模方法為三軸平臺的結構設計與動態性能評估提供了有效工具,并可推廣至其他運動機構的設計分析中。
1177
320科技工作室 ??? 1月前
淺析無人機仿真技術 
四、 基于MATLAB/Simulink的 實時仿真 MATLAB作為一種功能強大的科學計算軟件,已經得到廣泛的應用。
4803
無人機圈 ??? 3年前
MATLAB/ADAMS求解動力學 
CASE1采用ode45求解動力學方程adams后處理及數據導出MATLAB數據導入提供matlab文獻繪圖模板CASE2四桿機構運動學基礎采用simulink求解運動學方程、求解機構鉸鏈約束內力SIMULINK——ADAMS聯合仿真過程及注意事項 CASE3(曲柄滑塊)拉格朗日動力學構建方法采用simulink
1029 3
偉_sss ??? 5年前
Comsol多體動力學剛柔耦合仿真方法 
二、提交計算并查看結果 1、提交計算與第一部分相同,不需要進行過多的設置 2、可以在結果中查看活塞桿的應力變形情況 第四部分:瞬態多體動力學剛柔耦合分析 在這部分中,我們提供了一個類似的凸輪搖臂機構,同樣的,
6470 6
精品課程推薦 ??? 1年前
Adams與Matlab聯合仿真示例 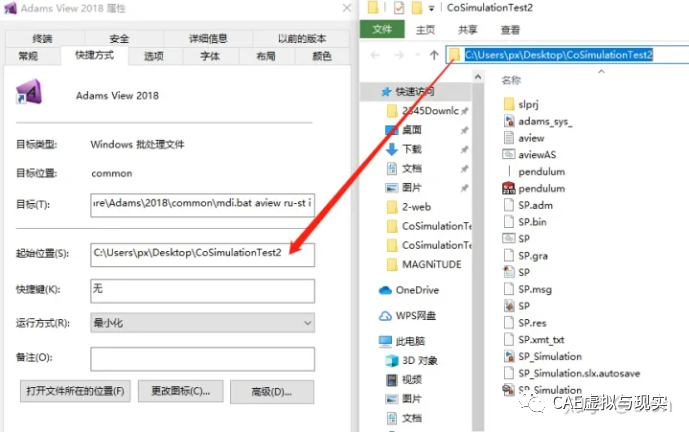
四、Matlab搭建仿真系統 打開Matlab,運行Pendulum_a指令(就是Adams導出機械系統的文件名),如圖所示。 運行adams_sys指令,調出adams的simulink系統,中間黃色的模塊(adams_sub)就是我們需要的機械系統模型。
3625 3 2
仿真客 ??? 3年前
基于Adams的六足直立式步行機器人運動仿真分析 
仿真結果與理論運動學分析結果一致,lHJ 擺動角范圍可達45.5°,可通過改變lHJ延伸桿lJK的長度和曲柄lOF桿長度來調節機體步幅大小。4 原型樣機搭建及行走試驗圖9 所示為雙電機驅動的六足直立式步行機器人。根據單側步行腿連桿機構運動仿真模型,構建另一側步行腿機構模型進行運動學仿真,結果表明,兩側步行腿連桿機構的運動軌跡和測量曲線變化一致,仿真結果與理論運動學分析結果一致。
4238 7 8
仿真客 ??? 3年前
飛行器系統仿真與驗證 
依據軌跡計算結果,建立系統級總體仿真模型,根據目標軌跡與實際軌跡的相對位置設計導引律,從導引律求出理論飛行狀態,理論飛行姿態與瞬時姿態比較得出差值,把差值送到設計的姿態控制律,得到理論舵角,理論舵角與實際舵角的差值送到執行機構,控制執行機構動作。
3841 2 1
航發設計 ??? 3年前
無人潛水艇的設計與仿真 
在 Simulink 中,用戶可以簡單地定義一個固定的阻力和浮力系數,也可以做得更精準些。譬如,導入一個阻力和浮力系數和雷諾數對應的數據庫,然后以查找表(look up table)的形式,在 Simulink 仿真的過程中動態改變阻力和浮力系數,達到精度更高的仿真效果。
3926 4 2
海工 ??? 4年前
Amesim電磁鐵仿真:電磁鐵結構參數設計優化的新方法 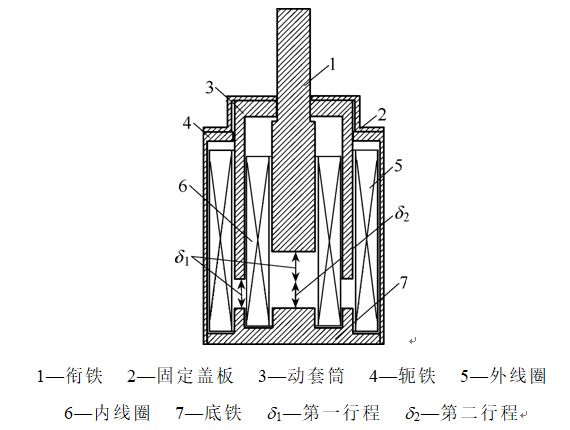
本文采用的Ansys Maxwell與ADAMS聯合仿真的方法,能夠獲取吸力特性、位移特性等電磁機構重要參數,為電磁機構的優化設計提供了新的思路。
2839 1
技術哥 ??? 3年前
挖掘機多體動力學仿真 
圖16 斗桿質心速度曲線 07 總結 本案例為工程機械領域機械機構運動仿真,模擬挖掘機挖掘、卸載及復位整個循環過程的運動動作,為挖掘機機構設計及液壓缸參數設計提供依據,驗證了INTESIM-FMBD軟件處理復雜工程機械多體動力學仿真能力
3746 3
CAE仿真學習菌 ??? 2年前
隔爆箱水壓試驗機的液壓系統設計 
摘 要:設計了礦用隔爆箱水壓試驗機的液壓系統,使用AMESim軟件對液壓系統進行仿真分析,得到壓緊端蓋的位移、速度和加速度曲線以及壓緊油缸的上、下腔壓力曲線,跟蹤并記錄了某礦用變頻器隔爆外殼的水壓試驗過程。關鍵詞:礦用隔爆箱水壓試驗機;液壓系統仿真;AMESim;0 引言某礦用隔爆外殼共四個門,分別使用四個液壓缸提供壓緊力。
4134 3
機械工程師 ??? 2年前
基于PLC的閥門生產線控制系統設計與仿真分析 
相比于其他的編程工具(如Java、C++等),Simulink可通過繪制方框圖代替編寫程序,因此降低了開發難度;同時軟件會自動調整最大步長,以保證仿真精度,有利于提升仿真系統的響應速度[8]。基于Simulink工具箱的系統模型構建方式如下。首先選擇用于構建數學模型的傳遞函數。
4469 4 1
機械工程師 ??? 2年前
基于SolidWorks的自動裝卸機械結構設計 
3 自動裝卸結構的運動仿真 夾持紙箱設計為 530 mm×230 mm×370 mm,在平板拖車 中實現紙箱的設置,在平板拖車上方設置夾持機構,夾持機構向 下運動,機械手做向心運動使箱體夾緊,上抬一定高度在工作臺 水平移動,之后垂直向下在工作臺放置箱體,最后夾持機構翻 轉,松開機械手,夾持機構回到初始位置,重復裝卸過程。在整個 仿真運動中,要求運動速度準確,圖 4 為自動裝卸結構運動仿 真。
4789 5
太極元氣 ??? 2年前
基于MATLAB的直接序列擴頻通信系統的仿真模型 
四、結語本文研究直接序列擴展頻譜通信系統的擴頻過程和抗干擾性能,使用MATLAB中的SIMULINK工具箱設計與仿真直接序列擴展頻譜通信系統,仿真實現了偽噪聲系統從偽隨機PN碼的產生到擴頻、調制,信道中加入噪聲,解擴接收信號最后解調還原成原始窄帶信號的過程。觀察了原始信號、擴頻、解擴等幾個過程的頻譜圖,并對這些頻譜圖進行對比,分析信源發射的信號頻譜從拓寬到還原的過程。
5027 3 1
Matlab心得交流 ??? 2年前
常見的幾種90°翻轉機構 
首先,還是來看一下要分析的有哪些機構: 1、齒輪齒條式±90°翻轉機構; 2、連桿式±90°翻轉機構-1; 3、連桿式±90°翻轉機構-2; 4、連桿式±90°翻轉機構-3; 5、四方向90°翻轉機構-1。
4862 2 1
工廠物流自動化 ??? 4年前
ABAQUS四旋翼無人飛行器仿真分析 
四旋翼無人飛行器在結構上更為簡潔:四只旋翼相互抵消扭矩,不需要專門的反扭矩槳;具有更簡潔的控制方式,僅通過改變四只旋翼的轉速即可實現各種姿態控制。因此,系留型四旋翼無人飛行器備受國內外很多專家和學者的關注和研究。本文以系留型四旋翼無人飛行器為研究對象,采用通用大型有限元分析軟件ABAQUS建立了對應的力學仿真模型。
5611 2 1
aero-engine ??? 2年前
行業案例 | MBSE解決方案(五):基于SysML的設備級建模與多學科聯合仿真 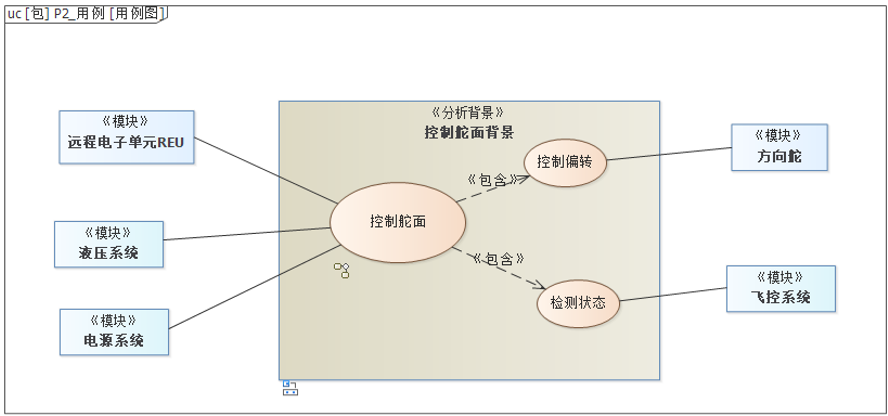
在下文的案例中,重點展示如何實現以系統模型為核心,對不同專業學科模型的調度和聯合仿真,解決跨工具、跨領域、跨尺度的集成仿真問題,推動MBSE的進一步落地應用。MBSE應用案例下文以“伺服液壓系統”為例,展示MBSE在系統設計中的應用。該系統用于接收遠程電子單元的控制指令,控制飛機方向舵的舵面偏轉,由傳感器、傳動機構及一系列閥組成。
5717 1 1
一起學MBSE ??? 3年前
通過仿真分析汽車的換擋原理 
使用 COMSOL 軟件模擬換擋機構 為了回答這些問題,我們選擇使用 COMSOL 多體動力學和結構力學模塊進行仿真,其中多體動力學模塊提供了預定義的功能,可用于定義各部件之間不同類型的關節。 多體動力學模塊 擴展了 COMSOL Multiphysics 和 結構力學模塊 的功能,使我們能夠對機械裝配體進行建模。
2473 6 1
仿真客 ??? 2年前
20條/頁 
 21
21 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
