



基于ADAMS的點按手法運動仿真 
機器人手臂中建立坐標系的步驟:(1)找出各關節軸,并標出這些軸線的延長線。在下述步驟(2)~步驟(5),僅考慮兩個相鄰的軸線。(2)找出關節軸i和i+1的公垂線或關節軸的交點,以關節軸i和i+1的交點或公垂線與關節軸i的交點作為連桿坐標{i}的原點。(3)規定Zi軸沿關節軸i的指向。
3058 2
擺渡人張 ??? 2年前
ADAMS行星齒輪機構運動學及動力學仿真 
圖7行星輪和內齒輪Y方向接觸力 在ADAMS中對接觸力做傅里葉變換,得到頻域內的接觸力變化曲線,由圖可以看出接觸力的最大值出現在與旋轉頻率相同。 圖8行星輪和內齒輪Y方向接觸力頻域圖 4 剛柔耦合分析 4.1 目的 進行剛柔耦合分析相對于剛體分析更加接近實際情況,得到的傳動比更接近實際傳動比。
4696 8 1
劉曉東 ??? 2年前
Ansys Zemax | 如何使用坐標返回功能 
參數右側的字母R表示該參數由坐標返回功能控制,其代表的意義和其他求解類型相似。每次運行坐標返回后,原參數值的求解類型、變量或在多重結構中控制的數據都將被替換為坐標返回功能計算的結果。 在本例中,我們只需修改Y方向偏心即可將S3的坐標軸恢復至與表面1坐標軸重合。Y方向的偏移量實際為20*sin(20) = 6.8404個透鏡單位。
2439 3
宇熠科技 ??? 3年前
基于DeltaD打印機的剛柔耦合運動學分析 
由坐標變換關系可知,相鄰量坐標之間可通過4個齊次坐標變換進行描述,關系表達式為:通過計算最終可得其表達式為:綜合上式得出運動方程為:其中:k表示坐標系的編號,c和s分別代表cos和sin的縮寫;Ttz為坐標系k沿Zk軸平移距離bk,使Xk和Xk+1軸相交;Trz為坐標系k的Xk軸繞Zk軸旋轉θk,使Xk軸和Xk+1軸共線;Ttx為坐標系k沿Xk+1軸平移距離ak,
4517 3
擺渡人張 ??? 2年前
Ansys Workbench后處理中,利用APDL命令提取繞圓柱坐標系的扭矩角度 
并且為了方便校核準確性還提供了沿圓柱坐標系Y軸的變形量。并且,除了界面顯示的結果外,還會在WB的結果文件夾中,顯示named Selection區域所有節點的編號/距離選定坐標系的距離/沿坐標系Y軸的變形量/換算后的角度值等信息,以便進行其它數據處理。
2741 4 1
cae_lizh ??? 6月前
Maxwell繪圖 坐標系簡介 
(只改變原點,不改變X軸、Y軸、Z軸方向)
旋轉(Rotated):相對于現有坐標系,通過旋轉坐標軸,來創建新坐標系,坐標系原點不變,X軸、Y軸、Z軸方向均發生改變。
偏移和旋轉(Both):利用以上偏移和旋轉角度來創建新坐標系,坐標系原點和X軸、Y軸、Z軸同時發生變化。
5143 3 2
陳亞明 ??? 1年前
UG修改幾何體顏色,基準平面,從坐標系進入草圖平面等筆記 
UG修改幾何體顏色,基準平面,從坐標系進入草圖平面等筆記修改幾何體的默認顏色,在菜單,首選項,對象,切換到實體,修改它的顏色. 如果在菜單里面有一些菜單命令沒有,可以在定制中找到缺少的菜單,把它拖動至菜單相應的位置上。按shift鍵,取消選擇.
3169
張偉一 ??? 3年前
SACS軟件單元計算長度修正指南:不再困惑Ly與Lz 
二、先搞懂坐標系,否則全白搭在SACS軟件中,有兩套坐標系需要分清:全局坐標系(整個結構的大方向)X軸:水平方向Y軸:另一水平方向Z軸:垂直方向(重力的反方向)
局部坐標系(每個桿件自己的方向)x軸:沿著桿件軸線,從起點指向終點y軸:位于桿件軸線與全局Z軸形成的平面內,并且垂直于桿軸線z軸:垂直于上述平面,用右手定則確定
2538 1 2
陳美合 ??? 5月前
底盤Adams仿真模擬 附adams板簧工具下載 
若兩數據相差不大,則通過調整hardpoint 的prod inboard來調整預載(一般修改y軸和z軸的坐標),調該坐標的y和z軸坐標。經多次調整后(用二分法)得到預設值。 6. 輪跳仿真:根據設計時輪胎的最大壓縮量輸入仿真條件 7.
4332 25 20
學無止境. ??? 4年前
利用Adams/view搭建整車動力學模型 附ADAMS-View創建車輛輪胎路面步驟下載 
由于adams/View中沒法像car中更改輪胎的定位參數,如外傾角和前束角,所以這兩個角度在立柱上要體現出來。從而在view中定義輪胎旋轉軸時選定。側傾角標記點:由于View中各種角度的定義參考坐標系都是大地坐標系,所以需要在車架中心平面左右兩側定義兩個點,建議也用小圓球,用于在view中定義側傾角。
3589 4 2
灣灣梅 ??? 4年前
六軸碼垛機器人admas正逆運動學仿真 
基座自由度、大臂擺動自由度、小臂擺動自由度、腕部Y軸擺動自由度、腕部Z軸擺動自由度及其腕部末端X軸旋轉自由度 其導入過程為: (1) 機器人三維模型總體有6個部分。打開機器人的SolidWork三維模型,依次另存為6個“Parasolid(x_t)”類型的文件。
2403
余俊煒 ??? 3年前
Ansys Zemax|如何使用坐標返回功能恢復原坐標系 
坐標返回功能非常易于使用:先選擇“坐標返回”的坐標系的方式,再選擇“至表面”返回至期望表面的坐標系。“無”為禁用坐標返回功能其次還有三種恢復坐標系的方式可供選擇:“僅方向”:僅確定關于X、Y和Z軸的傾斜,以將坐標系的方向恢復到前一個表面。不會調整表面頂點的位置偏移。“XY方向”:確定關于X、Y和Z軸的傾斜以及在X和Y方向上的偏心,以恢復坐標系的方向。
1274
宇熠科技 ??? 2月前
生產制造 | 產品加工-EDGECAM創建多方向坐標系 
wx_fmt=jpeg&from=appmsg"></p><p>創建CAM坐標系可以將設計模型的坐標系轉換為機床能夠理解和執行的坐標系,從而使加工過程能夠順利在機床上實現。比如五軸聯動加工中心,需要通過合理的CAM坐標系設置,才能夠充分發揮其多軸聯動的優勢,實現復雜曲面的高效加工。
2822
海克斯康設計與仿真 ??? 1年前
基于Adams實現滯回曲線——轉自MSC公眾號 
圖5 不同參數下的z-x變化趨勢(左側為論文截圖,右側為Adams計算結果) 2.3 引用測試滯回曲線圖6 液壓轉向機壓力-角度曲線此測試曲線來源于液壓轉向機的輸入軸扭矩-壓力測試結果,常規是將其等效為中間的平均線,與實際存在差異。
4584 10 7
peaky ??? 4年前
基于機械系統動力學自動分析的多噴頭3D打印機運動學研究 
在此坐標系下圓形曲線和矩陣變換易于表達。設P(x,y,z)為空間內一點,并設點P在x Oy面上的投影N的極坐標為(ρ,θ),則稱(ρ,θ,z)為P的柱面坐標。并規定范圍是:0≤ρ<+∞,0≤θ≤2π,-∞<z<+∞。圖2 空間直角坐標系轉換為柱坐標系 本文設計的多噴頭3D打印機的各部件如圖3所示,其打印機底座采用圓形底座。
4625 4
擺渡人張 ??? 2年前
有限元理論基礎及Abaqus內部實現方式研究系列39: 梁單元差異(3)-剪力和彎矩 
由上可知,對y-加載,彎矩是繞-z軸旋轉。而-z軸也就是Mz方向可由梁方向t與加載方向F按右手正交坐標系規則叉乘得到。梁方向t由節點1指向節點2。如下圖所示。 對y加載,y下半部的為正,彎矩為正,彎矩是繞z軸旋轉。
7081 12 6
SnowWave02 ??? 3年前
UG編程實例教程—草圖之草圖基準設置 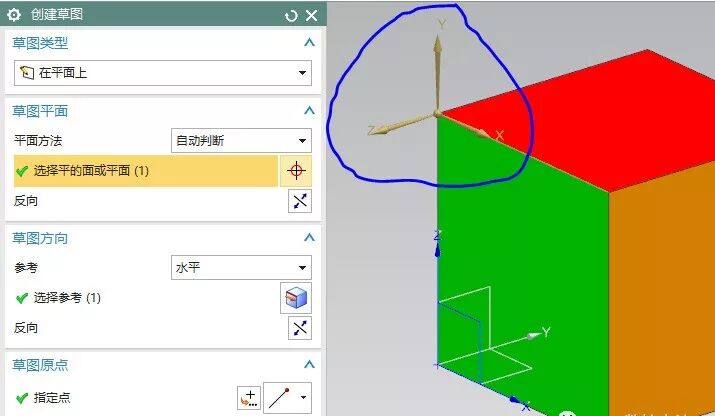
同樣位置,我們將x和y基準軸調整方向后,確定進入草圖,實體被翻轉,綠色面處于后面,x和y基準軸按照數學坐標系x和y方向進行擺放。 下面我們來看一下,草圖基準各個對象是如何控制的?草圖方向控制x方向,反向按鈕控制正方向;平面方法控制y方向,一般使用反向按鈕調整即可;草圖原點控制基準原點位置。
3089
張偉一 ??? 3年前
牛頭刨床機構分析 
,這行代碼表示下面的代碼是在左邊的坐標軸上作圖,修改 ylabel('角位移/\circ'); axes(haxes(2)); ylabel('位移/m'); hold on; grid on; text(1.15,-0.65,'\theta_3'); text(3.4,0.27,'\theta_4'); text(2.25,-0.15
2758
FE-有限元鷹 ??? 3年前
設計仿真 | Adams變拓撲分析之傳感器 
前面已論述觸發事件為質心通過Y軸,因此,整個歷程中會有四次事件觸發,因此,右側曲線為每次事件觸發的時間和最終的計數,兩者正好對應。當然,這類計數的效果Adams還有很多方式可以實現,但是通過sensor結合事件評估與senval()函數的方式,是我們經常采用的一種方法,總體比較簡單直接。通過這個簡單的實例期望對三者的功能有深入的了解,以便展開下一實例的應用。
2821
海克斯康設計與仿真 ??? 1年前
FRED應用:數字化極坐標數據取樣 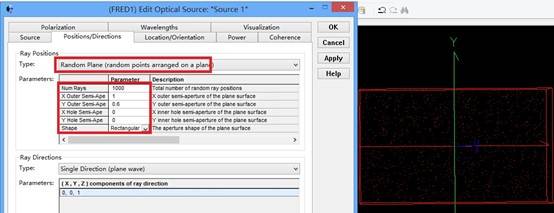
接著,點擊“選擇X,Y最小值點”按鈕,然后在極坐標圖中選擇rho=0,theta=0的點。在下面的圖中,0,0點是藍色的。下一步,點擊“選擇X最大值點”按鈕。選擇X軸的一個點(不一定是最大值),然后輸入相應的值到“X最大值”文本框中。下一步,點擊“選擇Y最大值”按鈕,選擇沿著Y軸的一個點,輸入對應的值到“Y最大值”文本框中。
1167
信光嗎 ??? 2月前
20條/頁 
 37
37 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
