



有限元程序-熱力耦合彈性動力學(xué) 
本報告將討論瞬態(tài)演化問題的完全熱力耦合。在給出溫度場的基礎(chǔ)上,給定彈性力學(xué)的邊界條件和初始條件后求解熱彈性運動微分方程,得到熱位移場。然后,再由溫度場和熱位移場,根據(jù)應(yīng)力、應(yīng)變和溫度關(guān)系的本構(gòu)方程,求出熱應(yīng)力 場。通過分析得出,由于左右橫向邊界ΔT=+50 的均勻溫升,隨著溫度的增加機(jī)械場中的形變量增大,進(jìn)而使應(yīng)力增加。
3941 1 1
力學(xué)AI有限元 ??? 1年前
無人機(jī)葉片顫振的詳細(xì)介紹及流固耦合仿真分析講解(含105講視頻教程) 
課程內(nèi)容概覽1.流固耦合仿真:介紹流固耦合的基本原理,以及如何在STAR-CCM+中進(jìn)行流固耦合仿真,分析無人機(jī)在復(fù)雜流場中的動態(tài)響應(yīng)。?(圖:槳葉流固耦合仿真)2.懸停仿真:針對無人機(jī)懸停狀態(tài)進(jìn)行仿真分析,研究懸停狀態(tài)下的氣動特性、穩(wěn)定性和控制策略。(圖:自由度懸停)3.噴霧施肥仿真:模擬無人機(jī)在農(nóng)業(yè)應(yīng)用中的噴霧施肥過程,分析噴霧效果、覆蓋范圍和優(yōu)化方案。
5640 30 8
技術(shù)鄰公告 ??? 1年前
Comsol多體動力學(xué)剛?cè)?em>耦合仿真方法 
右鍵“凸輪”選擇指定位移/旋轉(zhuǎn)。旋轉(zhuǎn)中心:所選實體的質(zhì)心;實體層:邊界;指定旋轉(zhuǎn)中心位移:均勾選并設(shè)置為0;指定旋轉(zhuǎn)軸:0,0,1;轉(zhuǎn)動角:dege。最后打開旋轉(zhuǎn)中心:邊界,旋轉(zhuǎn)凸輪中間的滑塊邊界當(dāng)做旋轉(zhuǎn)軸。 ③右鍵凸輪連接柱和凸輪連接桿支座、支撐座圓柱,建立固定約束。
6475 6
精品課程推薦 ??? 1年前
基于Matlab Simulink的三軸運動平臺剛?cè)?em>耦合仿真 
針對上述問題,基于模態(tài)綜合法原理,在Simulink環(huán)境中構(gòu)建三軸運動平臺的剛?cè)?em>耦合動力學(xué)模型,旨在真實反映系統(tǒng)在運動過程中剛體位移與柔性變形之間的耦合效應(yīng),為平臺結(jié)構(gòu)動態(tài)特性分析與優(yōu)化提供可靠的仿真參考。剛?cè)?em>耦合動力學(xué)研究同時包含大范圍剛體運動與彈性變形相互作用的系統(tǒng)動力學(xué)問題。針對三軸運動平臺等多體系統(tǒng),直接采用有限元法進(jìn)行全柔性建模將導(dǎo)致自由度龐大、計算效率低下。
1177
320科技工作室 ??? 1月前
基于DeltaD打印機(jī)的剛?cè)?em>耦合運動學(xué)分析 
為保證模型從初始位置進(jìn)行運動,將仿真時各關(guān)節(jié)的角位移設(shè)置如下:θ2=time+0.41;θ3=time+1.57;a4=time.從而可得其驅(qū)動角位移曲線如圖3所示.將各轉(zhuǎn)角位移帶入運動學(xué)方程,利用Matlab求解可得其動平臺末端質(zhì)心的位移曲線如圖4所示.3 Adams和Hypermesh剛?cè)?em>耦合運動學(xué)分析將三維模型導(dǎo)入到Adams中并按照其運動關(guān)系在各關(guān)節(jié)加入對應(yīng)的約束副
4517 3
擺渡人張 ??? 2年前
Abaqus單元的命名規(guī)則 
三維殼單元 Abaqus中的三維殼單元命名如下: 第一項: 常規(guī)應(yīng)力/位移單元(S) 連續(xù)應(yīng)力/位移單元(SC) 三角形應(yīng)力/位移薄殼(STRI) 熱傳輸殼(DS) 第二項:節(jié)點數(shù) 第三項:減縮積分(可選) 第四項: 可選五自由度 耦合溫度-位移(T) ABAQUS/Explicit中的小應(yīng)變公式(S) 第五項:
3030 4
龍飛宇 ??? 3年前
ABAQUS中點面耦合約束的荷載單位 
該約束可以應(yīng)用于耦合節(jié)點上相對于全局或局部坐標(biāo)系的用戶指定的自由度。
4456 24 7
詩詞CAE ??? 2年前
喵星人嘔心瀝血總結(jié)ABAQUS易出錯的邊界條件 
這是因為轉(zhuǎn)動時該面需繞軸轉(zhuǎn)動,因此必定有面上的點發(fā)生U2方向位移,如果約束U2方向位移,相當(dāng)于約束面的轉(zhuǎn)動自由度。
解決方案(1)可在支座部件的轉(zhuǎn)動線上切一條線,并對線設(shè)置鉸豎向約束。如圖所示,對轉(zhuǎn)動線設(shè)置固定鉸接邊界條件。由于此處繞線轉(zhuǎn)動時并不影響U2位移,因此實現(xiàn)鉸接邊界。
(2)可在部件底部耦合一參考點,并對參考點設(shè)置鉸約束。
3141 27 15
會CAE的喵星人 ??? 9月前
ANSYS經(jīng)典三種局部結(jié)構(gòu)耦合約束方法介紹(重點介紹RBE3) 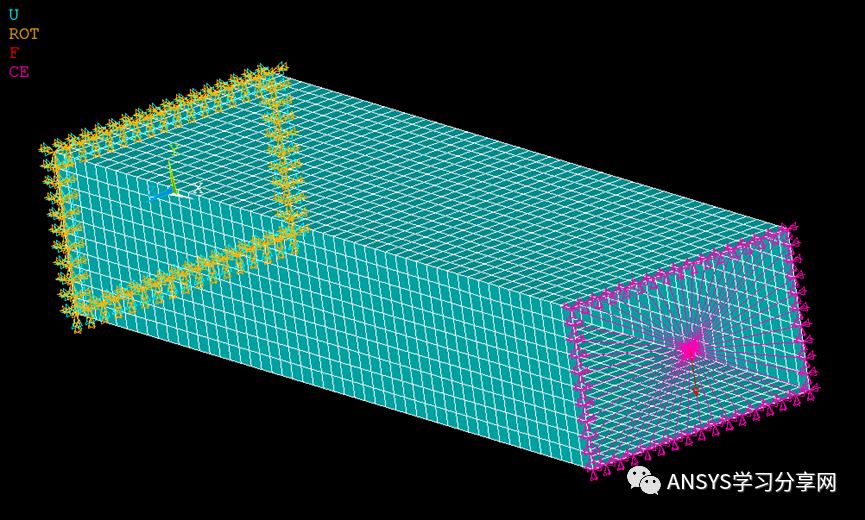
約束或載荷施加到master節(jié)點上,因為剛性區(qū)域不產(chǎn)生形變,所以整個剛性區(qū)域就會被約束,或者產(chǎn)生整體位移。二、節(jié)點耦合方法(CP) 筆者認(rèn)為節(jié)點耦合CP命令是三種方法中使用最繁瑣,當(dāng)然也是最強(qiáng)大的命令。CERIG和RBE3可以認(rèn)為是CP命令特殊場合的簡化使用。CP命令可以按照一個邏輯耦合節(jié)點之間的自由度,可以是一個規(guī)律,一個公式,非常靈活。
5359 2
Infiniteelements ??? 2年前
多學(xué)科統(tǒng)一的多體動力學(xué)建模方法 
在拉格朗日動力學(xué)中利用廣義位移和廣義速度描述系統(tǒng)的行為。1.廣義坐標(biāo)與自由度 能夠描述動態(tài)系統(tǒng)的坐標(biāo)可以很多,在一個系統(tǒng)中能夠唯一確定系統(tǒng)位姿或狀態(tài)的坐標(biāo)稱為廣義坐標(biāo),同時一般描述系統(tǒng)的廣義坐標(biāo)的個數(shù)等于系統(tǒng)的自由度。 在多學(xué)科耦合系統(tǒng)中,首先應(yīng)該確定系統(tǒng)的廣義坐標(biāo)和自由度。
3329 5 3
CAE仿真學(xué)習(xí)菌 ??? 2年前
電動汽車電機(jī)總成懸置系統(tǒng)仿真分析及優(yōu)化 
驅(qū)動電機(jī)在工作過程中,在懸置系統(tǒng)某一個自由度方向作用變化的激振力,并引起該方向的振動時,導(dǎo)致其他自由度方向的振動,出現(xiàn)耦合振動。由于耦合振動擴(kuò)大了振動頻率的范圍,為了達(dá)到相同程度的隔離效果,懸置必須要更軟,從而使得穩(wěn)定性降低。因此,需要對懸置系統(tǒng)進(jìn)行解耦優(yōu)化。
3355 14 10
仿真客 ??? 3年前
喵星人嘔心瀝血總結(jié)ABAQUS易出錯的邊界條件 

由于此處繞線轉(zhuǎn)動時并不影響U2位移,因此實現(xiàn)鉸接邊界。(2)可在部件底部耦合一參考點,并對參考點設(shè)置鉸約束。如圖所示,在底面中心位移耦合一參考點(快速生成面中心參考點插件可見視頻操作,公眾號回復(fù)“參考點插件”可免費獲取哦~)。并對參考點設(shè)置固定鉸接邊界條件。需要注意的是,參考點具有轉(zhuǎn)動自由度,為實現(xiàn)支座鉸接,必須釋放UR1自由度,同時約束UR2和UR3自由度。
1199
會CAE的喵星人 ??? 7月前
Matlab鐵路車-橋耦合模型 
<h1>本帖介紹MATLAB車-橋耦合模型</h1><p><strong><u>模型包含:1個車體、2個構(gòu)架、4個輪對、鋼軌和橋梁,自由度包含垂向、點頭運動如下圖所示:</u></strong></p><p class="ql-align-center"><img src="https://img.jishulink.com/msimage/202404/52274dfa247a85fb6d5f35e12e276f58
3058 1
兮楓如秋 ??? 2年前
【技術(shù)貼】EXCITE Mount Layout工具在動力總成懸置設(shè)計上的應(yīng)用 
在動力總成的懸置系統(tǒng)設(shè)計中,應(yīng)盡可能解除動力總成的6自由度之間的剛性振動耦合,一方面便于減小可能激起共振響應(yīng)的頻帶寬度,另一方面便于合理配置其固有振動頻率,使激勵頻率遠(yuǎn)離固有頻率,獲得良好的整體隔振效果。因此,解除多自由度振動耦合便成為動力總成隔振系統(tǒng)設(shè)計中與固有頻率的合理配置同等重要的目標(biāo)。通常對于懸置解耦率一般都要求。
2850 10 5
AVL先進(jìn)模擬技術(shù) ??? 3年前
SimSolid熱分析及熱固耦合案例講解 衡祖仿真
⑦查看結(jié)果:位移&應(yīng)力 SimSolid中可以通過設(shè)置溫度、熱通量、體積熱和對流4種邊界條件設(shè)定熱分析場景,并且可以設(shè)定每個接觸面的傳熱屬性。在熱分析結(jié)束后,通過將前一步結(jié)果的溫度場,作為熱載荷施加到線性靜力分析當(dāng)中,可以進(jìn)行熱固耦合分析,以得到熱應(yīng)力及其位移結(jié)果。
2434 1
達(dá)索ABAQUS/SW教育版服務(wù)商 ??? 1年前
abaqus_超彈性橡膠圓盤的Mullins效應(yīng)和永久變形 
.** 輸出單元能量損耗*ELEMENT OUTPUT,ELSET=單元集DMENER,** 定義節(jié)點自由度耦合方程*EQUATION方程中的項數(shù)節(jié)點編號/集合1,自由度1,系數(shù)1,節(jié)點編號/集合2,自由度2,系數(shù)2,...... (2)圓盤的靜態(tài)分析 靜態(tài)分析中,圓盤與剛性平面接觸,通過剛性面的位移來控制結(jié)構(gòu)的變形。
3276 3 1
想飛更高 ??? 2年前
hypermesh-ansys聯(lián)合仿真模型裝配1 
1.直接耦合在螺栓孔周圍建立兩層單元(1層washer),如圖1.1,然后將上下螺栓孔的兩層單元的節(jié)點耦合到同一個節(jié)點上,這樣這些單元的自由度將全部相同,將有相同的位移。圖1.1建立washer圖1.2圖1.3左側(cè)紅色框里選擇自動計算,右側(cè)紅色框選中所有自由度,節(jié)點選擇螺栓孔周圍的兩層所有單元的節(jié)點。
3857 10 6
刺殺泊松比 ??? 3年前
案例47-焊球中的電遷移 
該模型用SOLID226耦合場單元劃分網(wǎng)格。CONTA174接觸單元被限定在焊料球和銅導(dǎo)體之間。SOLID226和CONTA174單元具有本分析所需的以下自由度:濃度(CONC)、溫度(TEMP)、電壓(VOLT)和位移(UX、UY、UZ)。對于SOLID226單元,KEYOPT(1)=100111激活這些自由度。對于CONTA174單元,KEYOPT(1)=12激活這些自由度。
2974 2
龍飛宇 ??? 3年前
基于Ansys WB耦合場瞬態(tài)模塊的熱-力耦合分析(案例:剎車盤) 
圖6 剎車盤轉(zhuǎn)速變化設(shè)置圖7 摩擦片約束(x方向為施壓方向)摩擦片在整過程中只有一個方向的運動自由度,因此可以利用遠(yuǎn)程位移對摩擦片進(jìn)行約束,如圖7所示。由于分析步1中,在摩擦片x方向并未施加任何力與位移條件,處于“懸空”狀態(tài),為保證收斂,在分析設(shè)置中打開“弱彈簧”選項。兩個摩擦片壓力歷程曲線如圖8所示.
7283 9 4
晚竹田 ??? 3年前
伏圖石油石化行業(yè)解決方案及仿真APP介紹 
創(chuàng)建耦合連接,將接管中心點與接管端面自由度耦合。c. 接管中心耦合點創(chuàng)建位移約束,釋放除y向外其余自由度。
創(chuàng)建耦合連接
接管耦合點位移約束
d.
2843 2 1
仿真APP ??? 1年前
20條/頁 
 14
14 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
